
Introduction
Aircraft engines are exposed to a variety of external influences during operation causing gradual engine deterioration and damages over operation time (Kellersmann et al., 2018). Main influences concerning the engines high pressure compressors are deposition and erosion due to airborne particles (Richardson et al., 1979). To predict realistic erosion as well as deposition patterns, accurate modelling of the particle rebound after impacting a surface is indispensable.
Particle rebounds are statistical in nature due to varying particle sizes, particle shapes, target surface topography, particle rotation and particle break-up during contact. Existing modelling approaches based on empirical correlations fail to predict the spread in the coefficients of restitution (CoR) at different operating conditions than the original experimental setup by up to 100% (Bons et al., 2015). Furthermore, present modelling approaches based on physical considerations have focused on modelling particle impacts mean rebound coefficients only. Standard deviations of the coefficients of restitution vary with the considered particle and target surface combination. Hence excessive experimental testing of different particle-surface combinations is needed to simulate the statistical spread numerically. The scope of the presented work is to access the statistical spread of particle rebound data through analytical considerations. For simplification only statistical spread of particle rebound due to target roughness will be discussed here as a first step towards a general physical based spread model. The presented approach is based on work of Sommerfeld and Huber (Sommerfeld and Huber, 1999). It derives local impact angles
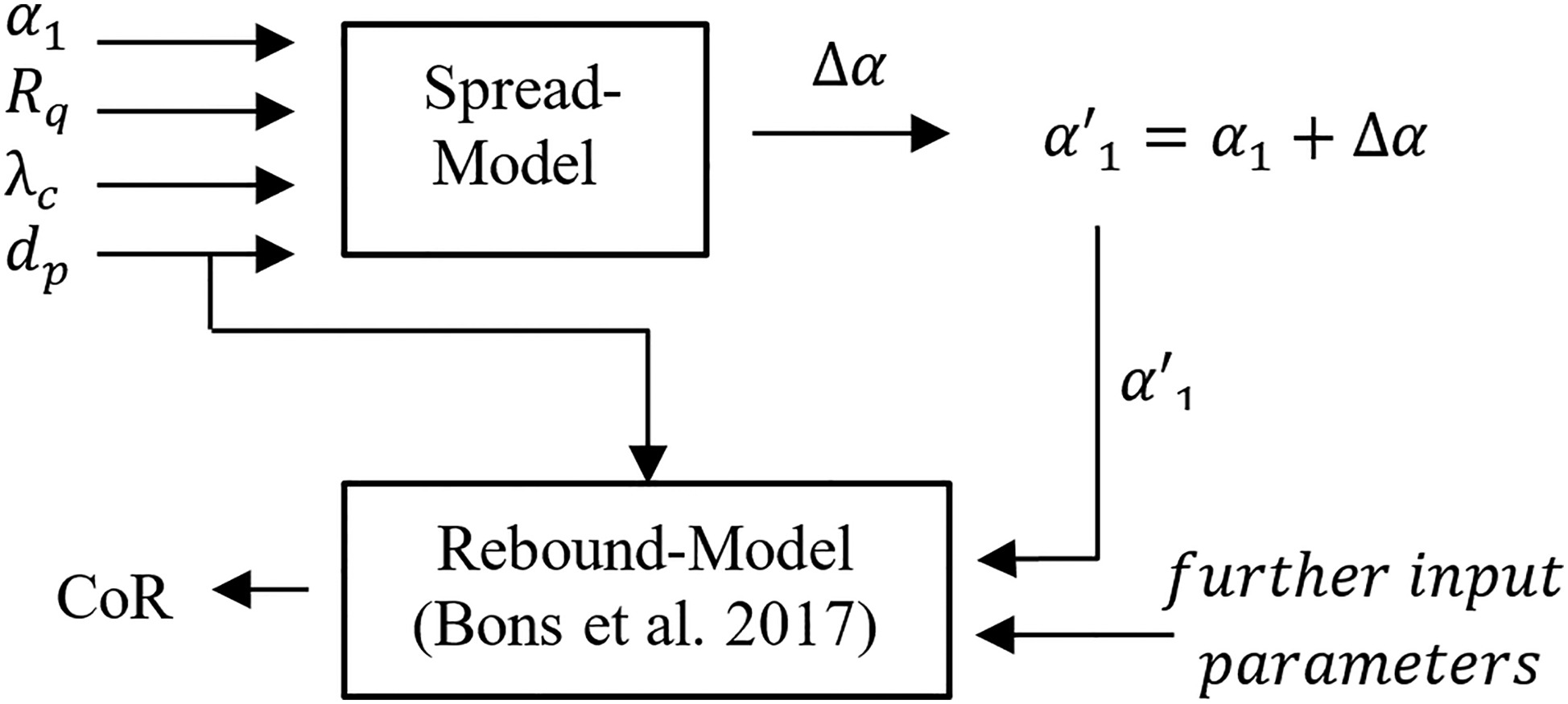
Further input variables for the Bons-Model are used according to (Whitaker and Bons, 2018) for ARD particles in a 1–100 μm size distribution.
Theoretical background
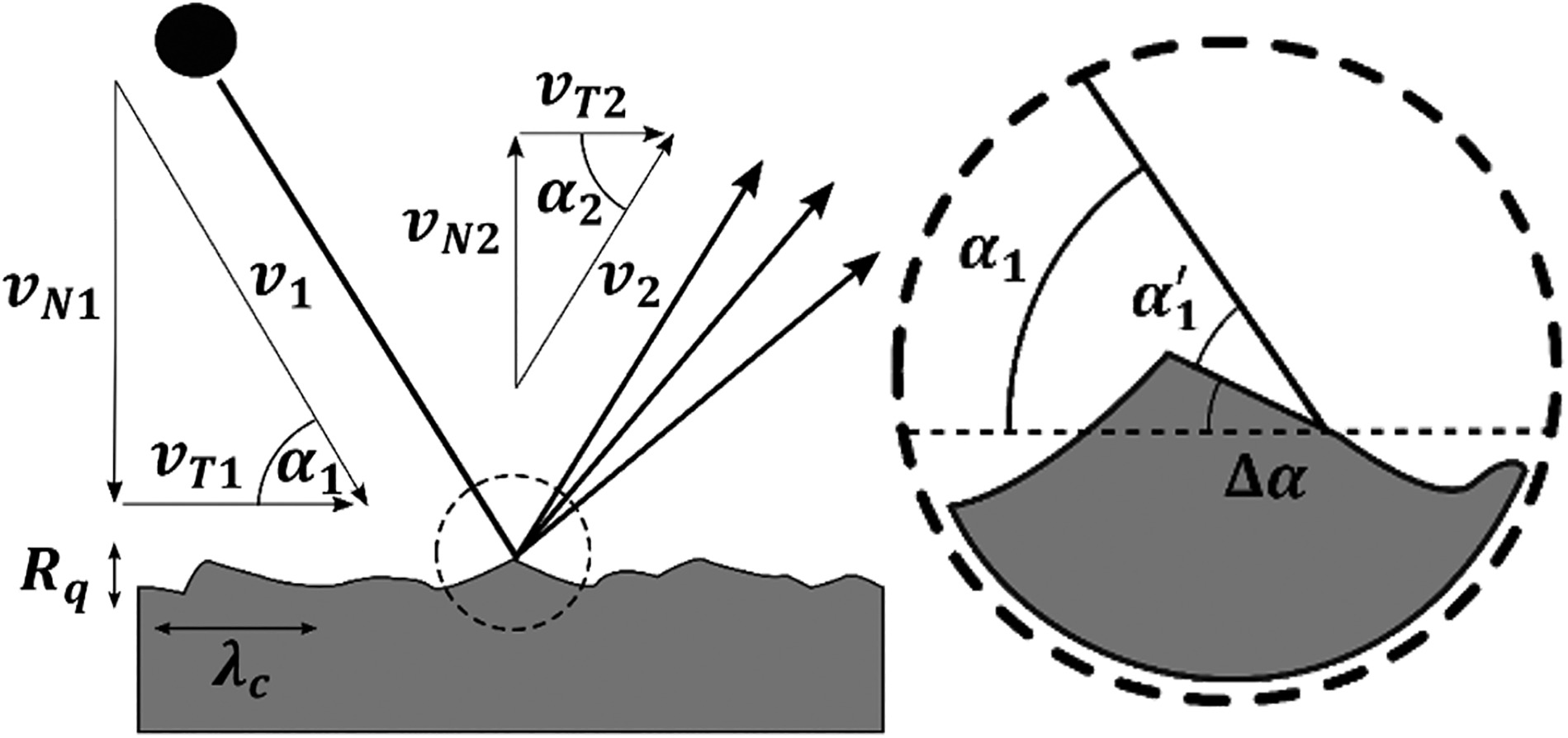
Usually coefficients of restitution are used to describe the energy loss during collision. They are defined as the magnitude of a parameter after rebound divided by its corresponding magnitude at impact (Figure 1):
To estimate these coefficients in turbomachine applications, rebound and deposition models are used. They are based either on a critical velocity approach derived by Brach and Dunn (Brach and Dunn, 1992) or a critical viscosity approach based on work of Tafti and Screedharen (Sreedharan and Tafti, 2010). Critical viscosity models concern particle softening mechanisms at high temperature applications in the turbine section and are not reviewed in this study aiming to evaluate particle impact in the engines compressors section. Deposition models based on critical velocity determine whether a particle sticks to the surface by comparing the actual impact velocity with a capture velocity for the impact event. Below this capture velocity the particle will deposit. If a particle does not deposit an estimate of the rebound velocity is applied.
These models are based on contact mechanics with elastic deformation in a Hertzian contact of a spherical particle with a flat surface in normal direction combined with adhesion during impact (Brach and Dunn, 1992). This approach has been extended to account for oblique impacts, elastic-plastic deformation and further external forces (Kim and Dunn, 2007; Singh and Tafti, 2015; Barker et al., 2017). Still it is valid for spherical particles only and rely heavily on empirical correlation (Bons et al., 2017).
Therefore Bons et al. (Bons et al., 2017) derived a quasi-physical but yet equally empirical and approximate modelling approach based on representing arbitrary particle shapes as a circular cylinder. It allows to model particle deformation as a 1D spring rather than a complex 3D deformation of a sphere. The model comprises elastic and plastic deformation, adhesion, and shear removal. It has been further improved by Whitaker (Whitaker and Bons, 2018) to account for stochastic spread of rebound data with an empirical curve fitting approach based on experimental data. Since this approach still relies on excessive experimental testing of different material and particle combinations a physical based access to the statistical spread due to surface roughness is desired in this work. Based on roughness profiles which have been found at deteriorated surfaces a sensitivity study has been conducted. The results of the sensitivity study will be discussed after introducing the developed modelling approach to statistical spread.
Surface roughness modelling
Characteristic roughness profiles for performance deterioration in turbomachinery components can be found in (Bogard et al., 1998; Bons et al., 2001; Syverud et al., 2005; Gilge et al., 2019). Based on their published data a Design of Experiments (DoE) has been carried out in this work:
The roughness root mean squared Rq and correlation length λc were used to characterize roughness height and elongation of the examined surface (Figure 3). The roughness profiles were processed with a morphological filter routine based on the closing principle (Serra and Vincent, 1992). The filtered profile defines how deep a particle of size

The roughness profiles have been generated artificially using the methods outlined by Garcia and Stoll (Garcia and Stoll, 1984). This procedure utilises roughness profiles with different Rq and λc that fulfil the Gaussian statistics. Corresponding slope angles are obtained by applying the morphological filter as described above. In this way the filtered profile leads to the local impact angle
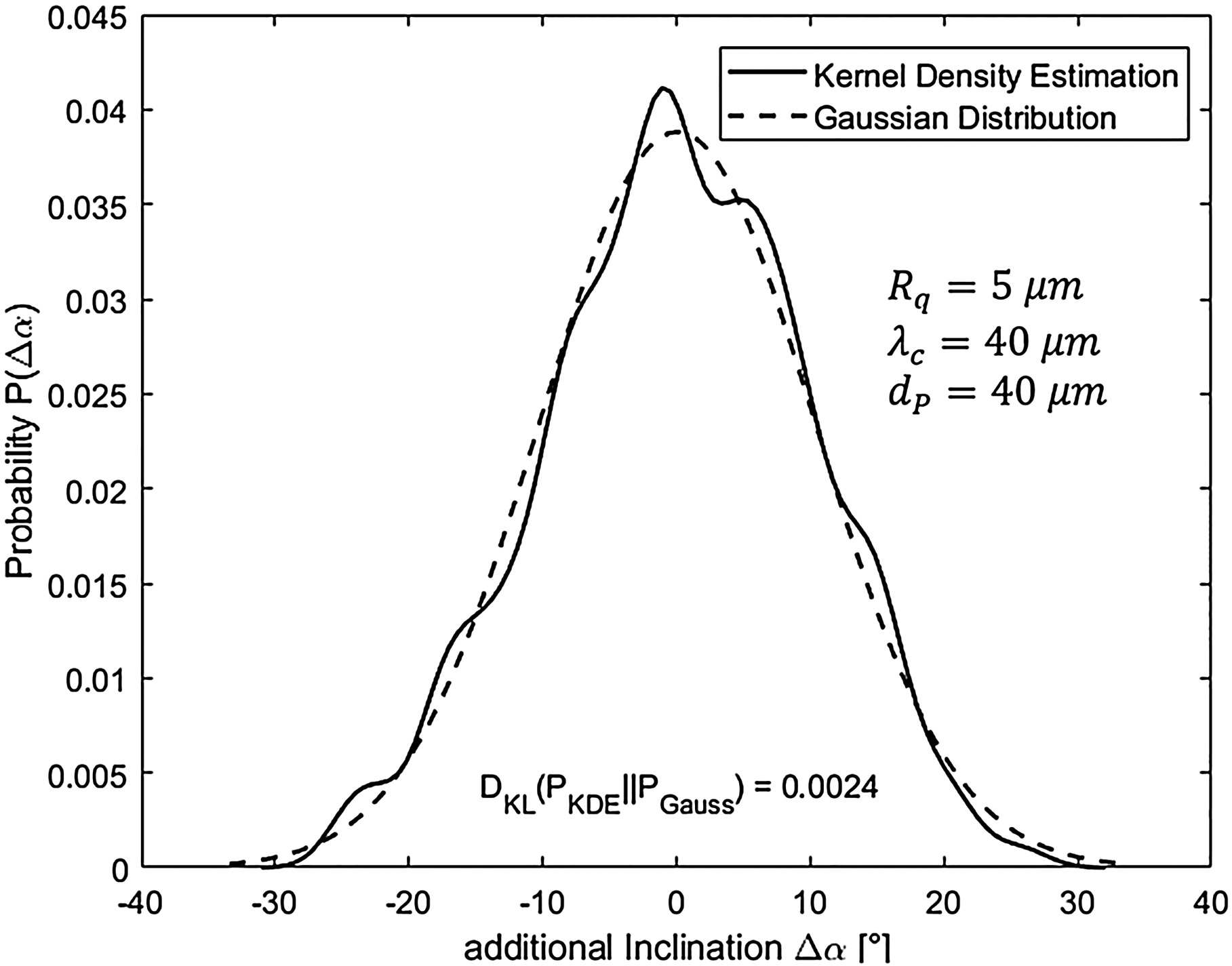
The Kullback-Leibler divergence is used to evaluate the quality of the approximation (Kullback, 1978). For values
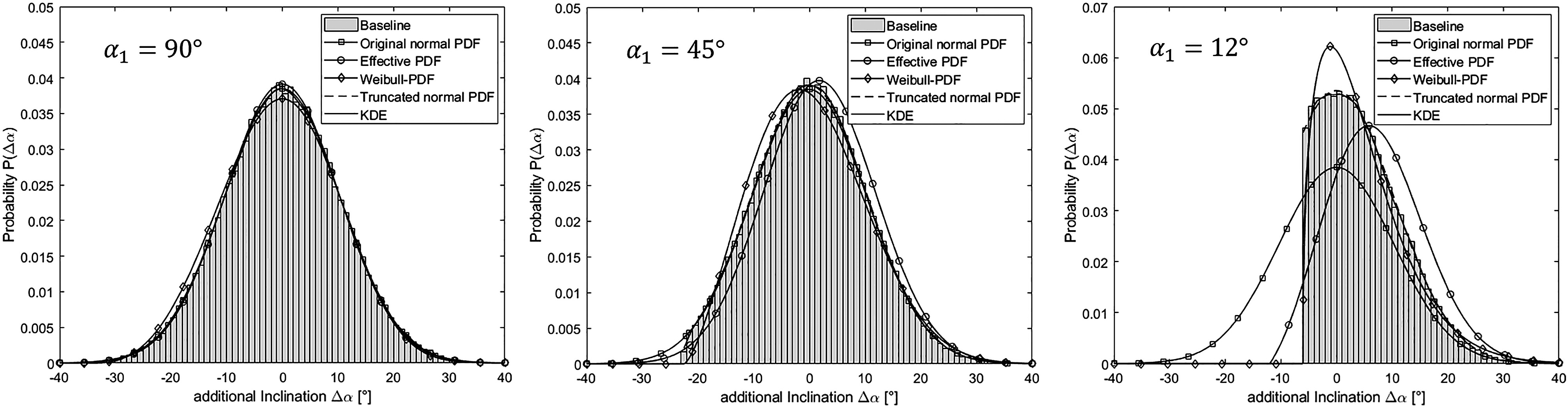
Figure 4 shows an example for the kernel density estimation and its corresponding normal Gaussian approximation. The Kullback-Leibler divergence for all generated profiles are close to zero with a median value of
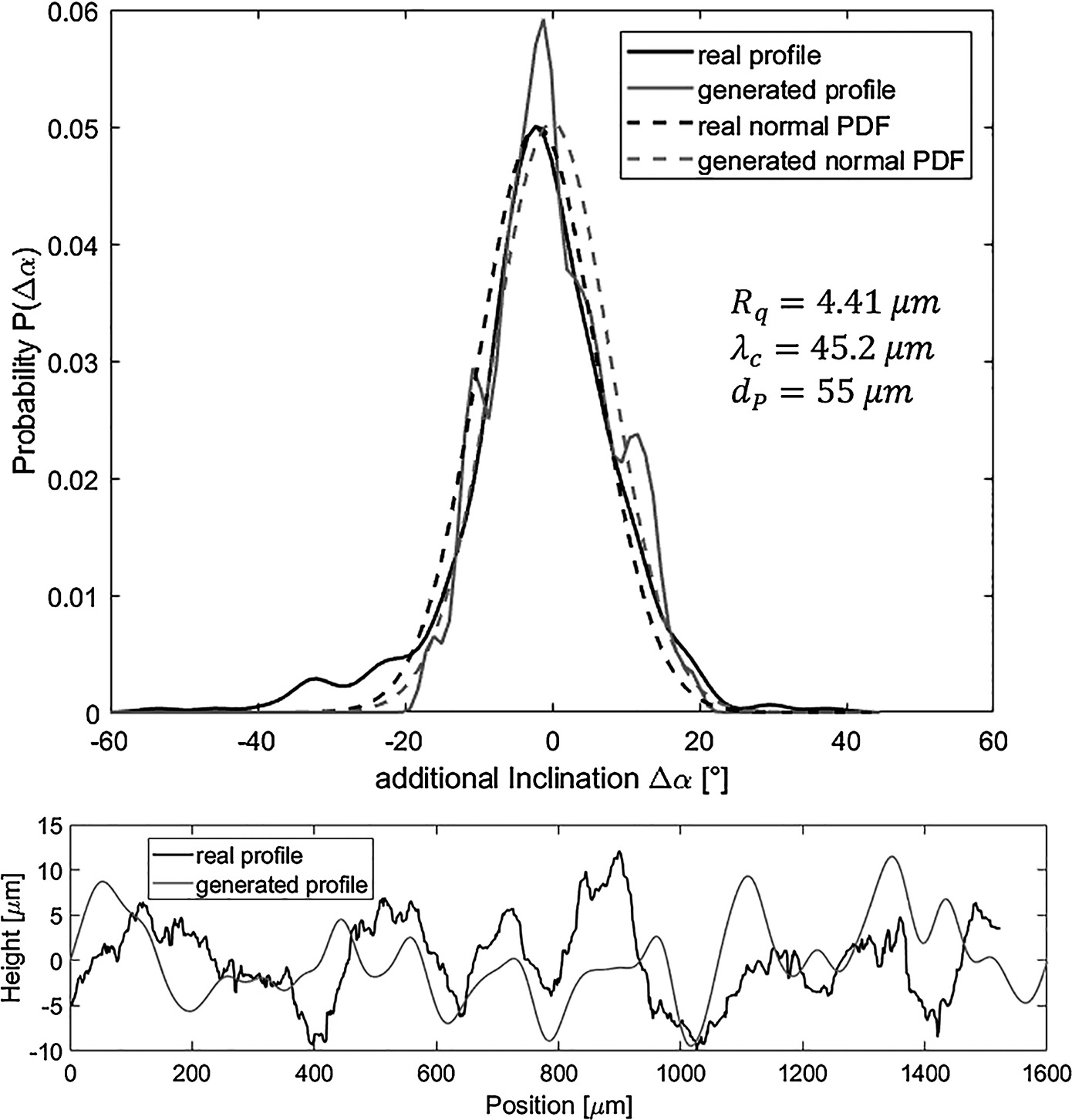
In order to validate the whole roughness generation process a surface roughness of a deteriorated compressor blade has been scanned with an optical profilometer (Talysurf CCI – Taylor Hobson) (Casari et al., 2018) and compared with an artificially created profile of the same roughness characteristics Rq and λc (Figure 5). With a value of
Modelling the local impact angle
After discussing a particle impacting normal to the surface, the variation of the global angle
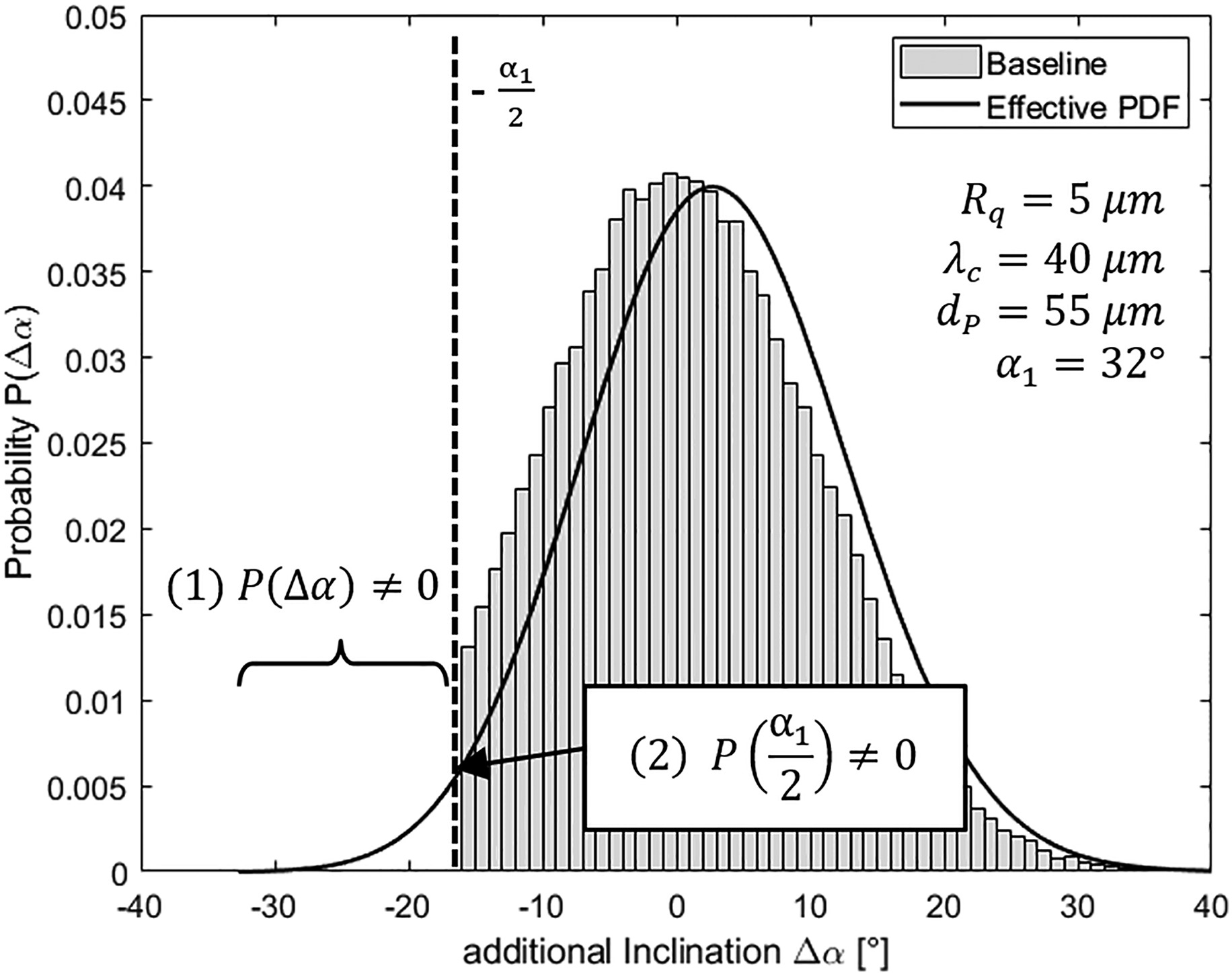
1. An additional inclination
2. If the absolute value of a negative inclination
If the generated local impact angle
The last step leads to the restriction that no negative inclination
In order to avoid this time consuming iteration loop in numerical simulations (Sommerfeld and Huber, 1999) proposed that this so called “shadow effect” can be described by an effective probability distribution function
The term
In the quest to predict the shifted distribution function with higher precision than the effective PDF by (Sommerfeld and Huber, 1999) but without the effort of additional iteration routines as proposed by (Konan et al., 2009). Two modelling strategies have proven to be promising:
1. Truncated Gaussian: A modified normal Gaussian PDF defined by
may be used for
and
2. Alternatively the Weibull Distribution defined as
with
The truncated Gaussian approach can be determined by an analytical relationship from each slope angle distribution of the corresponding roughness profile. To use the Weibull distribution further pre-processing steps are necessary, because the parameters k and
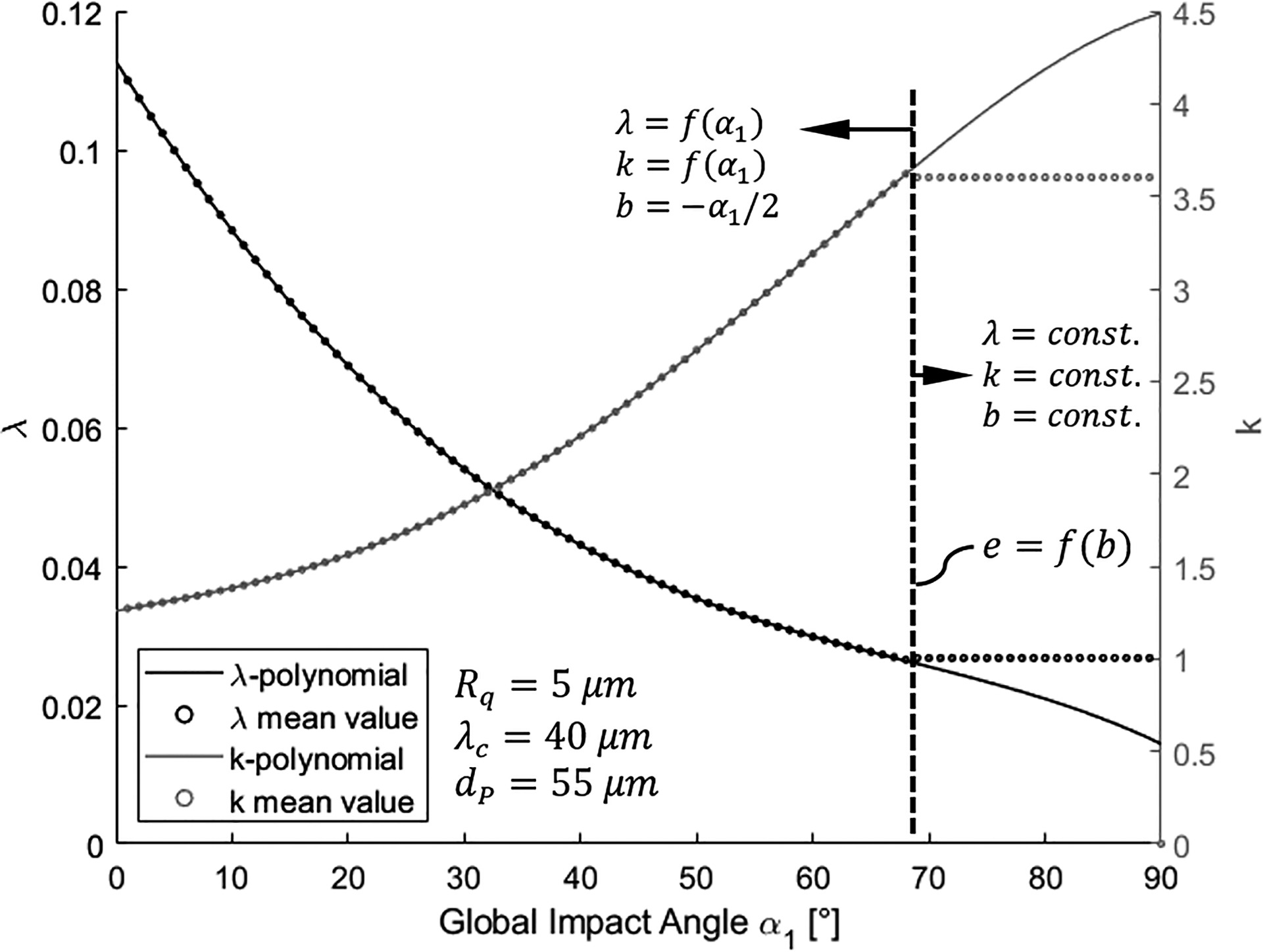
In the current study, the database for the polynomial coefficients includes every combination in the course of the DoE. Constants exceeding the DoE can be determined by interpolation.
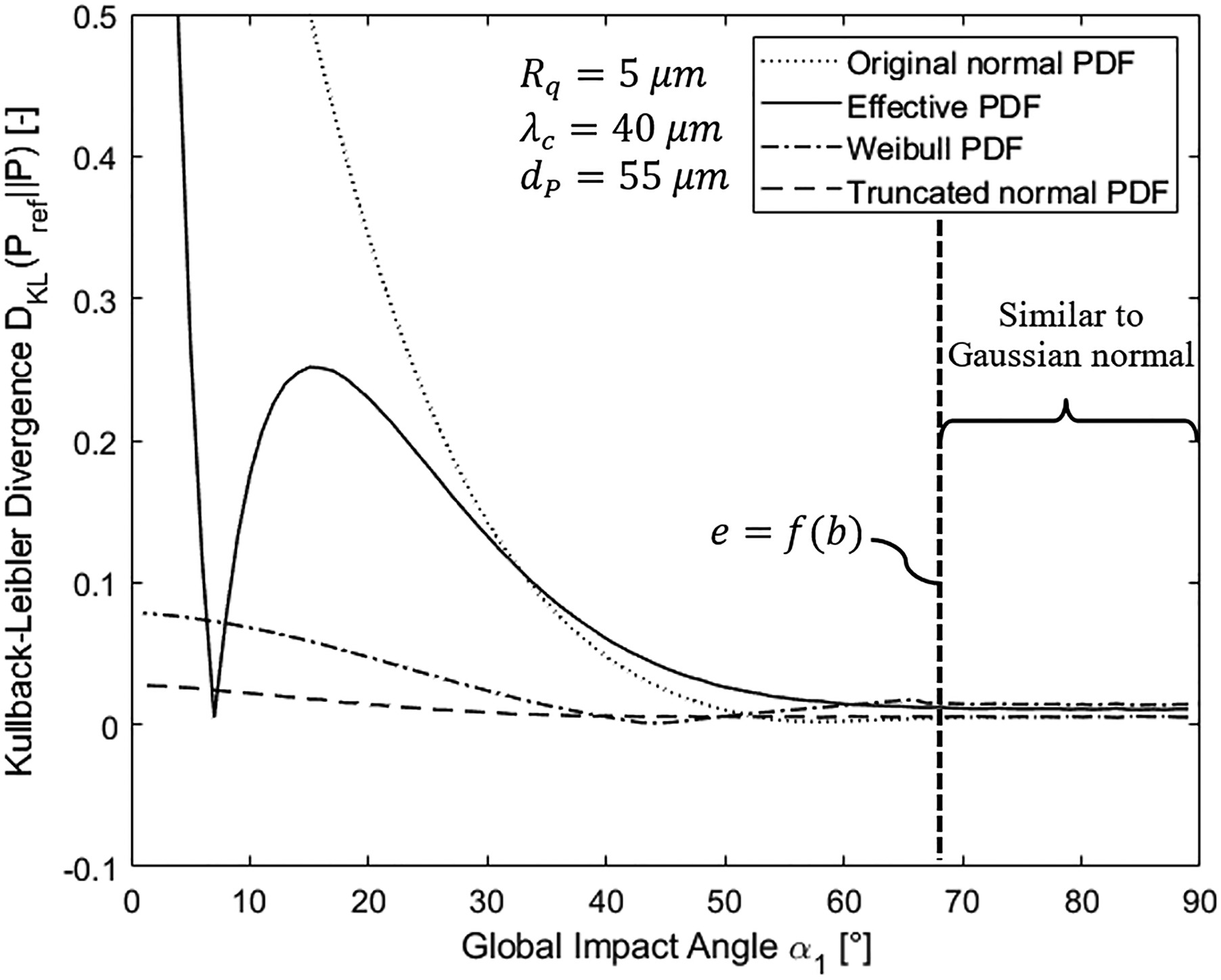
Choice of the PDF
In addition to the calculation of the coefficients the verification procedure by (Sommerfeld and Huber, 1999) enables the evaluation of the quality of the presented PDF's. The criterion to quantify the suitability is the previously described Kullback-Leibler divergence
Results and discussion
Based on roughness profiles which have been found to be characteristic for performance deterioration in compressor application (Bons et al., 2001) a sensitivity study has been conducted. A dimensionless roughness parameter
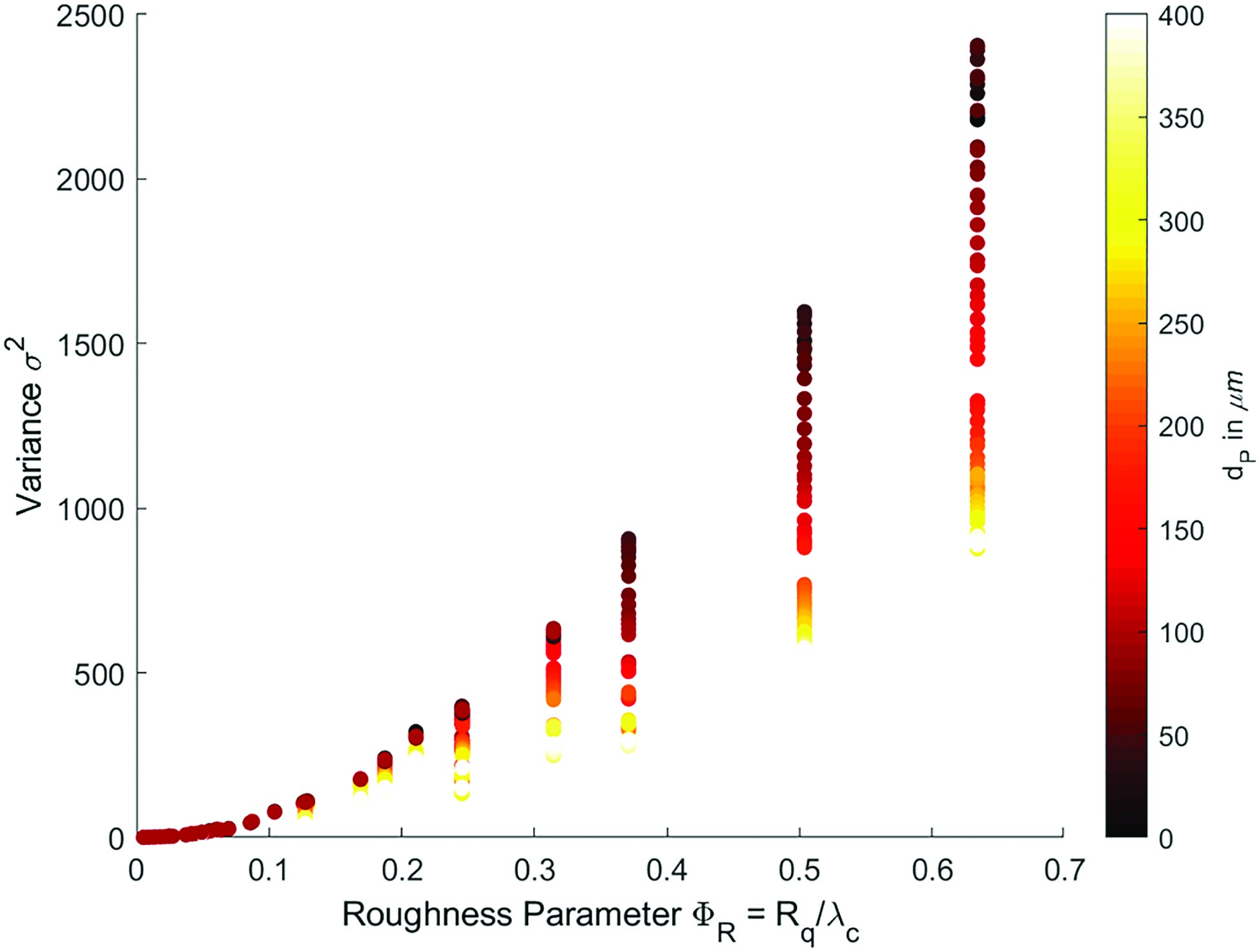
Figure 10 shows the variance of the additional inclination
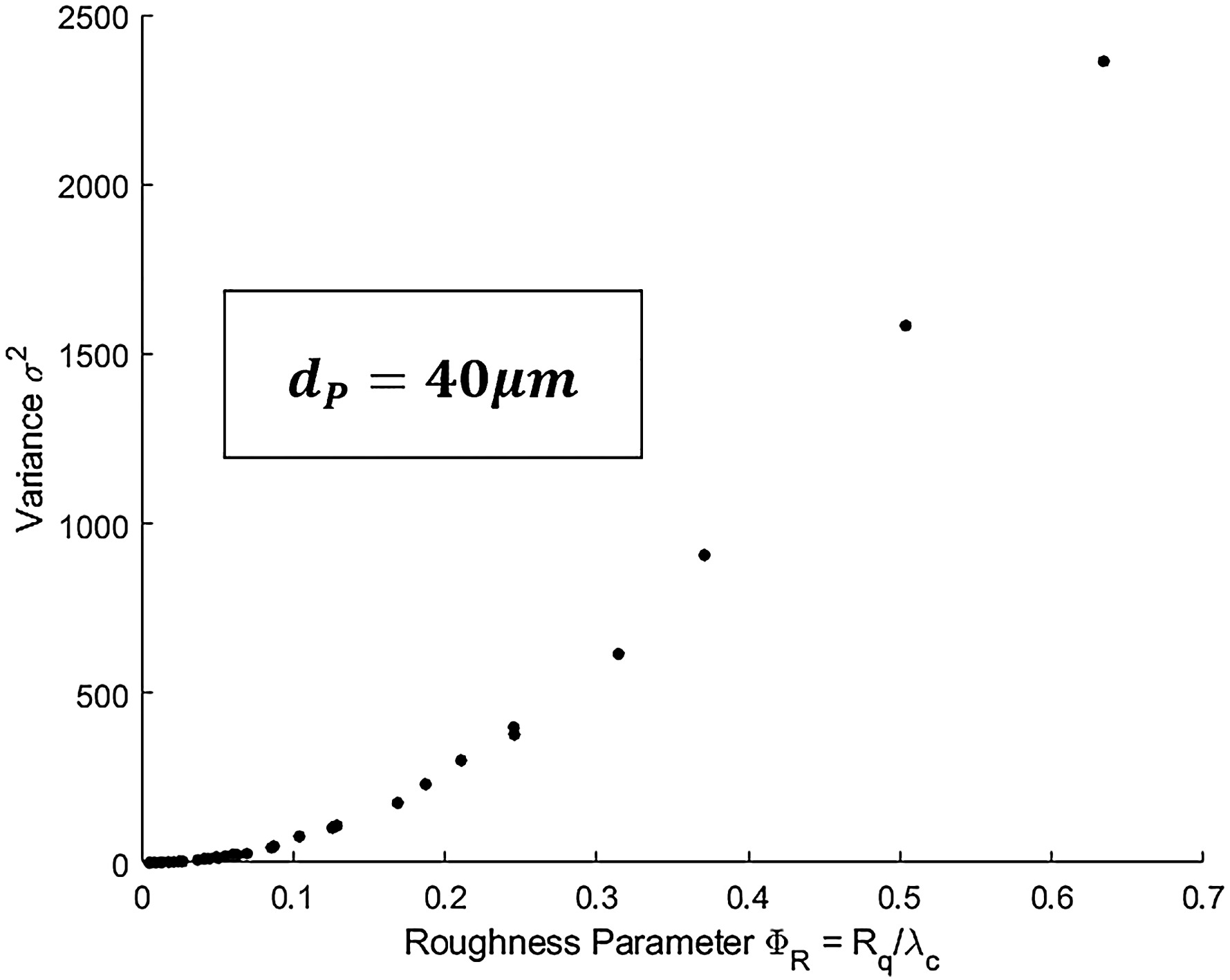

Figure 12.
Variance of the additional inclination Δα over roughness parameter ΦR and particle size dp.
To evaluate the effect of the inclination angle on the statistical spread of the CoR, the developed Spread Model is connected with the Bons-Model (Bons et al., 2017) as shown schematically in Figure 2. In this process a random additional inclination angle
Invert the considered CDF to gain
Generate a random number u in the interval [0, 1] from the standard uniform distribution.
Compute
The obtained random variable
This method allows to evaluate the statistical spread in CoR data due to the surface topography. Figures 13 and 14 show the synthesized CoR data for
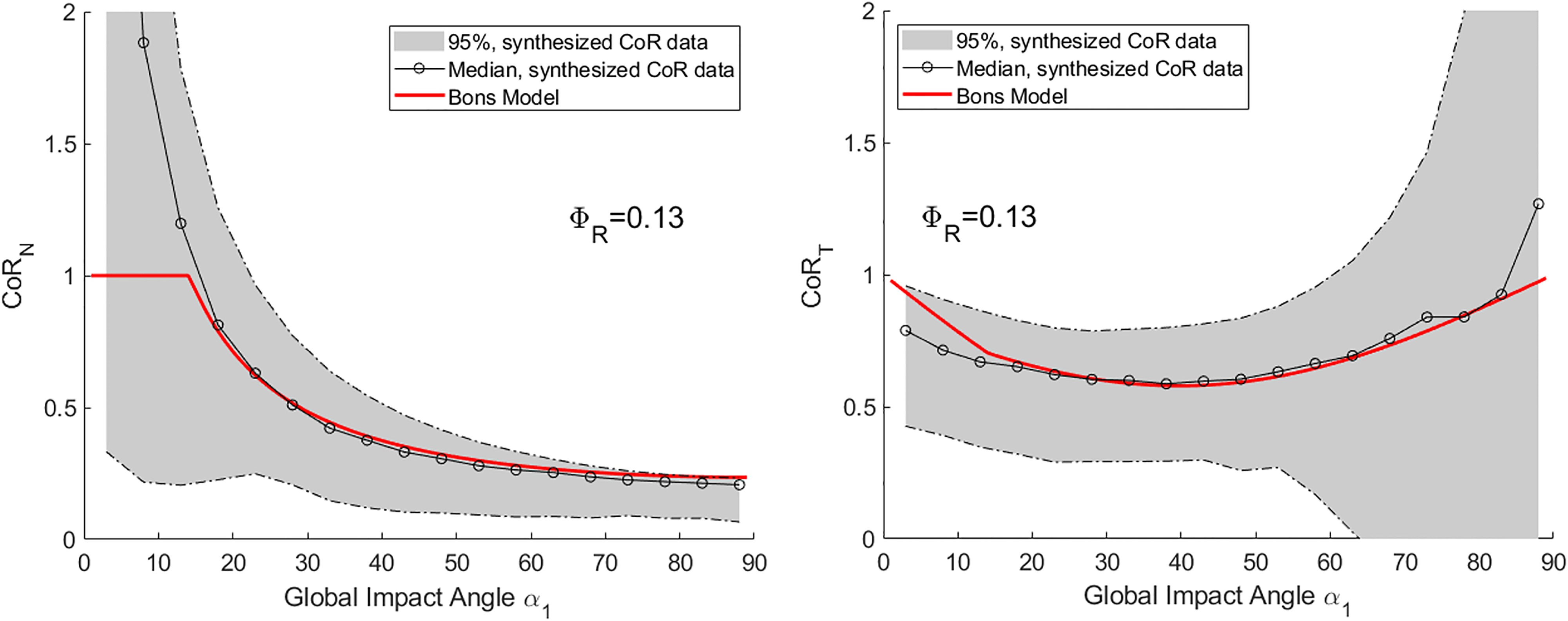
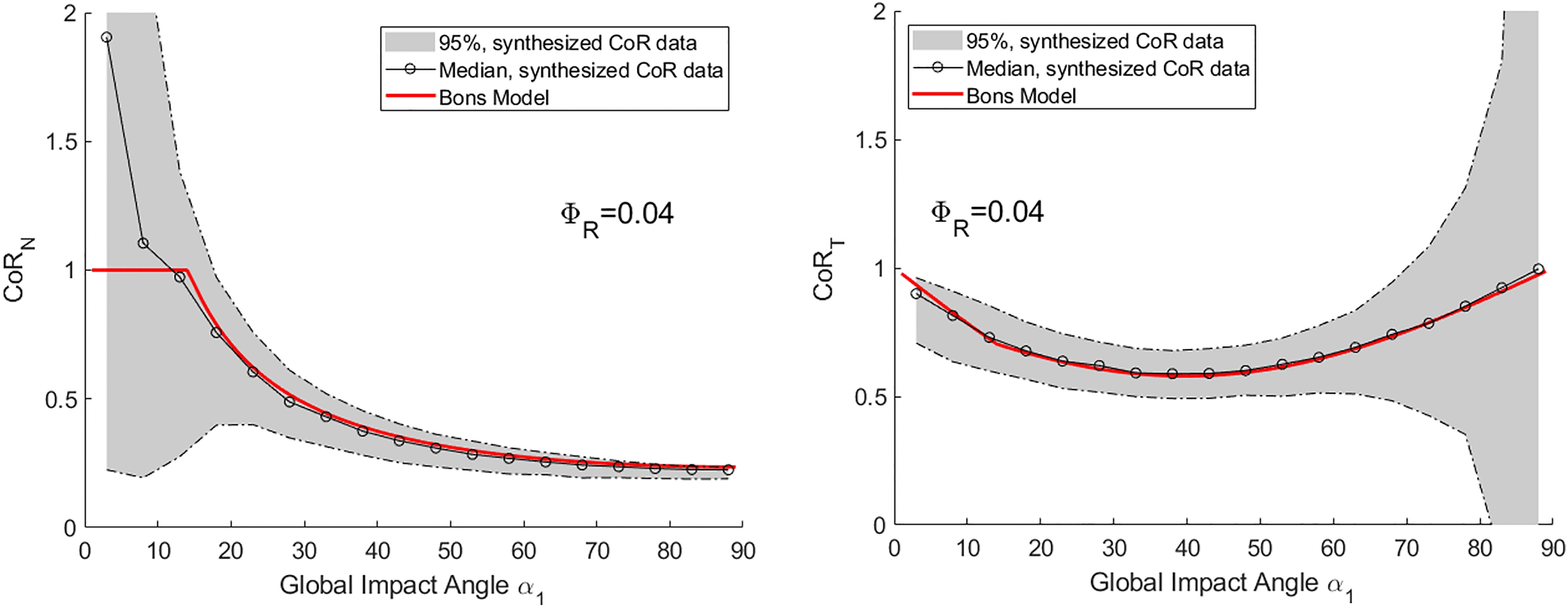
In order to analyse the observed data spread caused by surface roughness, the analytically generated data can be compared with experimentally obtained data from the literature – e.g. by Whitaker (Whitaker and Bons, 2018). The spread of synthesized data is in the same order of magnitude observed experimentally. This leads to the conclusion that the effect of surface roughness is significant for a particle's individual rebound behaviour and therefore must be taken into account in numerical simulations.
For the normal CoR the artificially generated data produce a scatter which is in good agreement with the measurement data by (Whitaker and Bons, 2018). The data spread is higher for small impact angles and decreases with rising angles. However the absolute value of the measurement data spread is under predicted for high global impact angles. For the tangential CoR the artificially generated data produce a scatter which is in good agreement with the spread in the data by (Whitaker and Bons, 2018) up to 80°.
Note that the measurement data by (Whitaker and Bons, 2018) as well as the presented model predict
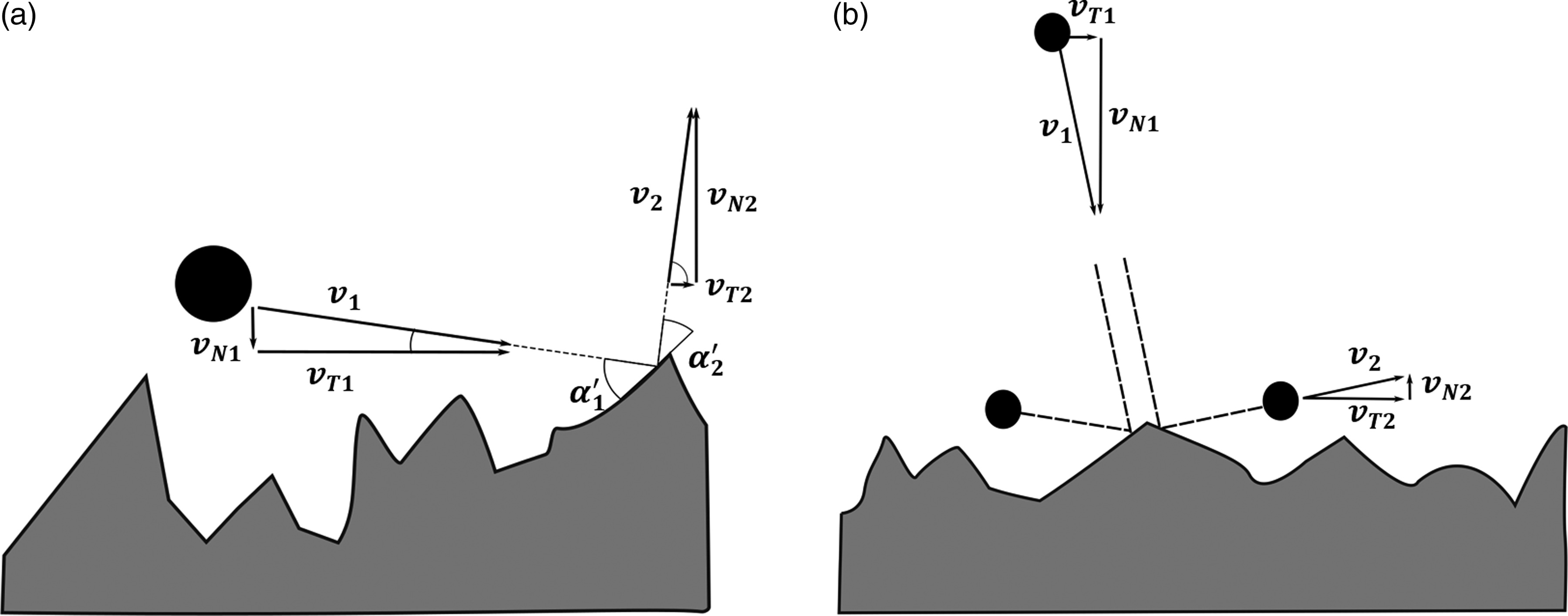
As can be seen in Figure 15b particles can be deflected in positive and negative direction, depending on the impact location. In addition the high normal velocity
Investigation of these phenomena will be the aim of further research.
Conclusions
A spread model has been developed that estimates the statistical spread of rebound data due to target surface roughness through analytical considerations. It predicts the local impact angle of an individual particle by evaluating how deep a particle can theoretically penetrate the roughness profile with respect to its size. Based on roughness profiles which have been found to be characteristic for performance deterioration in compressor application a sensitivity study has been conducted. A dimensionless roughness parameter
Nomenclature
Left Boundary of Distribution
Right Boundary of Distribution
Particle Diameter (µm)
Kullback-Leibler Divergence
Boundary Angle (°)
Weibull Shape Parameter
Sampling length (µm)
Probability Distribution Function
Root Mean Squared of Roughness (µm)
Particle Velocity (m/s)
Random Variable
Global Impact Angle (°)
Local Impact Angle (°)
Additional Inclination Angle (°)
Gaussian Random Variable
Weibull Scale Parameter
Correlation Length (µm)
Expected Value
Normalization Function
Standard Deviation
Variance
Cumulative Distribution Function
Dimensionless Roughness Parameter
PDF of Standard Normal Distribution