Introduction
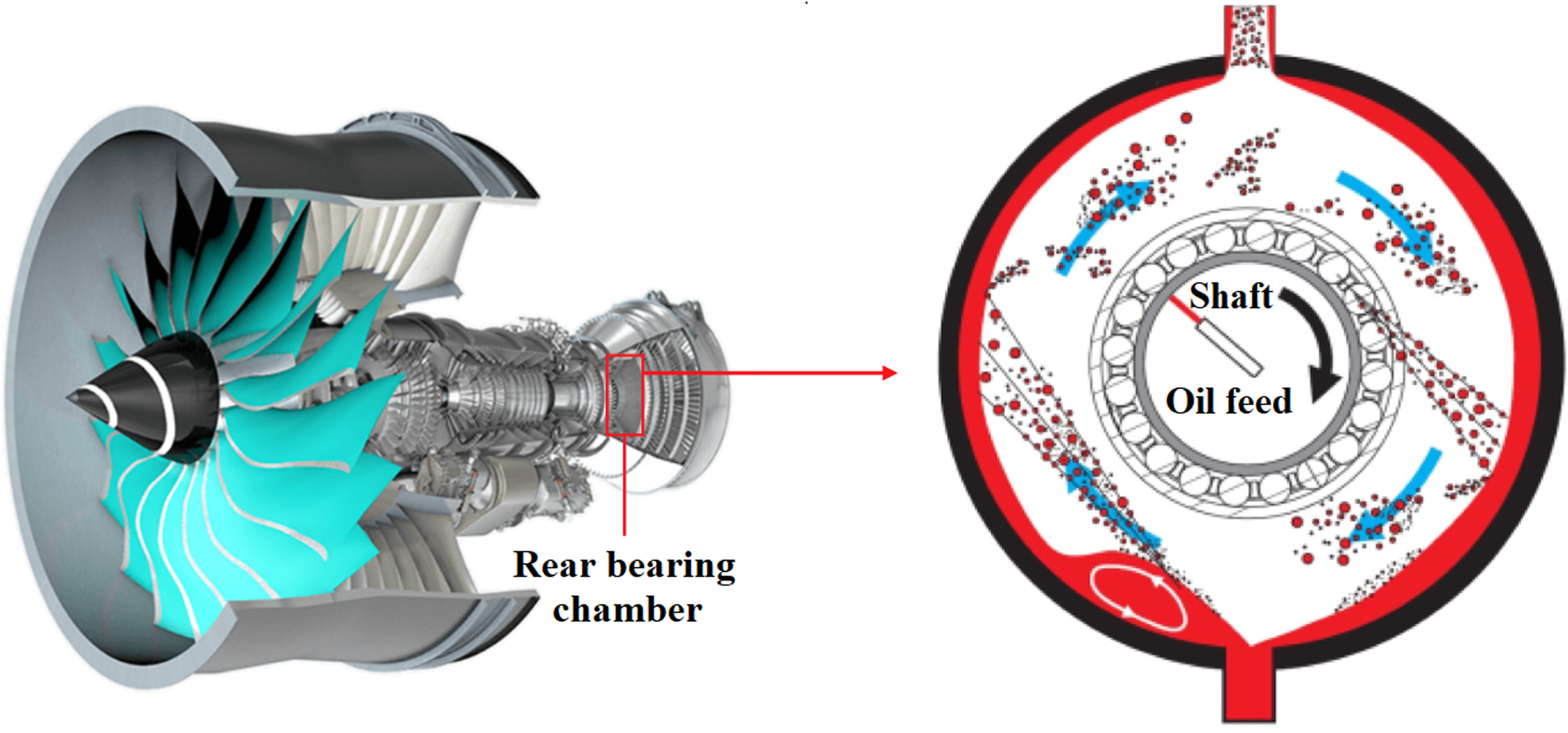
The prediction of the oil film thickness distribution plays an important role when it comes to improving and optimising the design of aero-engine bearing chambers. A schematic of the cross-section of a bearing chamber is shown in Figure 1.
Figure 1.
Rolls-Royce Ultrafan aero-engine and cross-section schematic of a bearing chamber (Rolls-Royce Plc, 2016).
Whilst the design of bearing chambers is mainly based on experiments, research focuses on finding adequate approaches to model two-phase air/oil shearing flows with Computational Fluid Dynamics (Bristot et al., 2016). However, modelling turbulent two-phase shearing flows with a sharp interface in an industrial context can be challenging due to the combination of a multiphase flow problem and the effects of high speed regimes. On the one hand, accurate results using CFD might be obtained in exchange for a high computational cost (Adeniyi et al., 2014), which is not practicable in an industrial context. On the other hand, averaged simulations would limit computational costs (RANS), although they struggle to treat the high velocity gradients in the interfacial region (Frederix et al., 2018), causing an overestimation of the levels of turbulence at the interface, corrupting the velocity and energy profiles and causing inaccuracies in the prediction of the flow. Egorov et al. (2004) proposed a correction for the RANS
With
The subscript i denotes the phase (either gaseous or liquid), A is the interfacial area density used as a switch to ensure that the source term is only applied in the interfacial region,
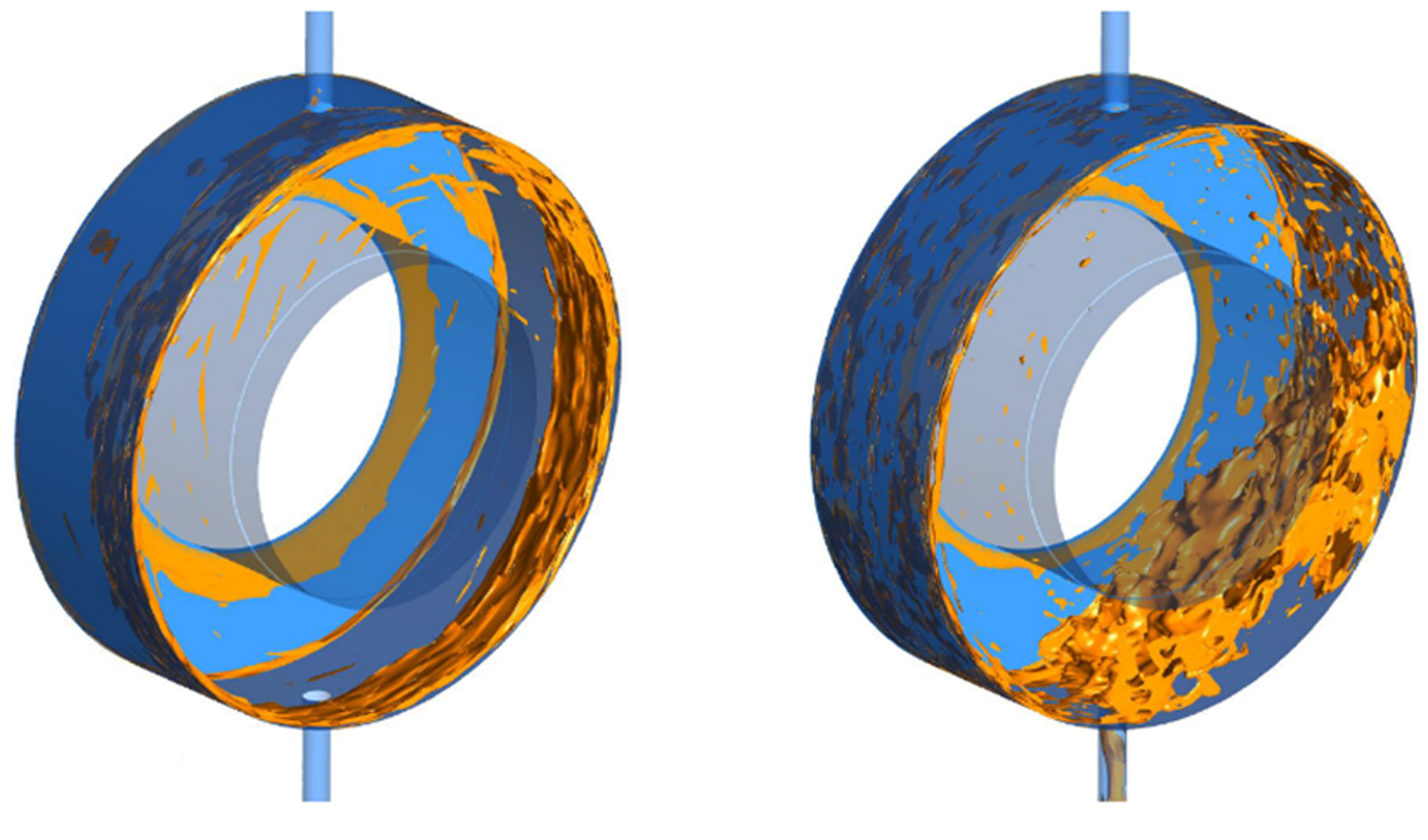
Figure 2.
Oil film thickness distribution influenced by the turbulence damping parameter B = 100 B = 10
The use of machine learning (ML) in computational fluid dynamics has become more and more common as the field of data science is gaining in popularity in industry. One of the best current features of ML in CFD is the improvement of existing low order turbulence models such as RANS models, thanks to high fidelity simulations such as DNS or LES data-driven ML models.
One can use ML to compute the source terms in the transport equations of RANS turbulence models. For example, Tracey (2015) used ML in order to reproduce the Spalart-Allmaras RANS model. They modified the solver in a way that used the output of the ML model instead of the standard Spalart-Allmaras model’s source term. The ML model was trained with a flat plate simulation dataset and used for the simulation of the flow around an airfoil. When looking at the friction coefficient, the author found very good agreement between the ML and the Spalart-Allmaras model. Despite the ML model giving promising results, the author warned that the differences found between prediction and true data could be explained by the fact that the ML algorithm was trained only with converged flow solutions. Singh (2018) used multiple sources of data for ML model training such as DNS, LES and experiments. Here, ML methods were used to improve the Wilcox’s RANS
This paper aims to address the problems related to the Egorov’s correction by generating a mesh and coefficient independent correction for the
Methodology
The methodology for the current research can be decomposed into three main tasks. The first is the creation of high fidelity datasets for the training of the ML model. Quasi-DNS simulations were carried out in periodic horizontal channels with a liquid phase at the base (water) and a gaseous phase on the top (air). One could assimilate the flow present in a periodic horizontal channel to the flow located on the external wall of a small portion of a bearing chamber with an oil film driven by air shear. Different interface heights and phase velocities were employed to diversify the training dataset. A proof of concept was carried out using qDNS simulations based on experiments (Fabre et al., 1987), which involve air shear over deep water. Then, a second study was performed using a ML model trained with qDNS data on flow conditions closer to the type of flow that one finds in bearing chambers (i.e., shallow water or thin films). The second task of the methodology is the implementation of the ML model, where the choice of the different input features is important and must be performed by considering possible physical links with the output. The number of inputs, layers and the type of neural network used must also be considered in the implementation of the ML model. The implementation of the model was performed within the Python API of the well-known PyTorch open source ML library. The final task of the methodology is the embedding of the ML model within OpenFOAM for unsteady RANS
Generation of the high-fidelity simulation training dataset
The Volume of Fluid method
The Volume of Fluid (VOF) method was used for the purpose of all simulations mentioned in this paper using the solver interFoam available in OpenFOAM. The VOF method describes the flow such that all phases share the same velocity and pressure fields (Hirt and Nichols 1981). The phase volume fraction
One can then describe flow scalar fields such as the density, kinematic and dynamic viscosity of a two-phase flow as:
where
The VOF method is widely employed in CFD to model multiphase flows and performs well in the case of strong instabilities in free surface problems provided that the mesh is refined enough in the interfacial region (Faghri and Zhang, 2006). In the context of a shearing two-phase flow, it can be challenging to preserve a sharp interface. The interFoam solver comes with a sharpening method of the interface that was implemented by Wardle and Weller (2013). In this method, a compression term is added to the transport equation of
In which
All the simulations mentioned in this paper were carried out using a surface tension
Discretisation schemes and solution methods for qDNS
The VOF solver interFoam was employed with the second order Crank-Nicolson time scheme with a coefficient of 0.9, the second order total variation diminishing (TVD) “van Leer” scheme van Leer (1979) to discretise the divergence terms in the transport equations of
Formulation of the correction source term
In order to obtain the correction source term
With:
where
Domain geometry, flow characteristics and case presentation
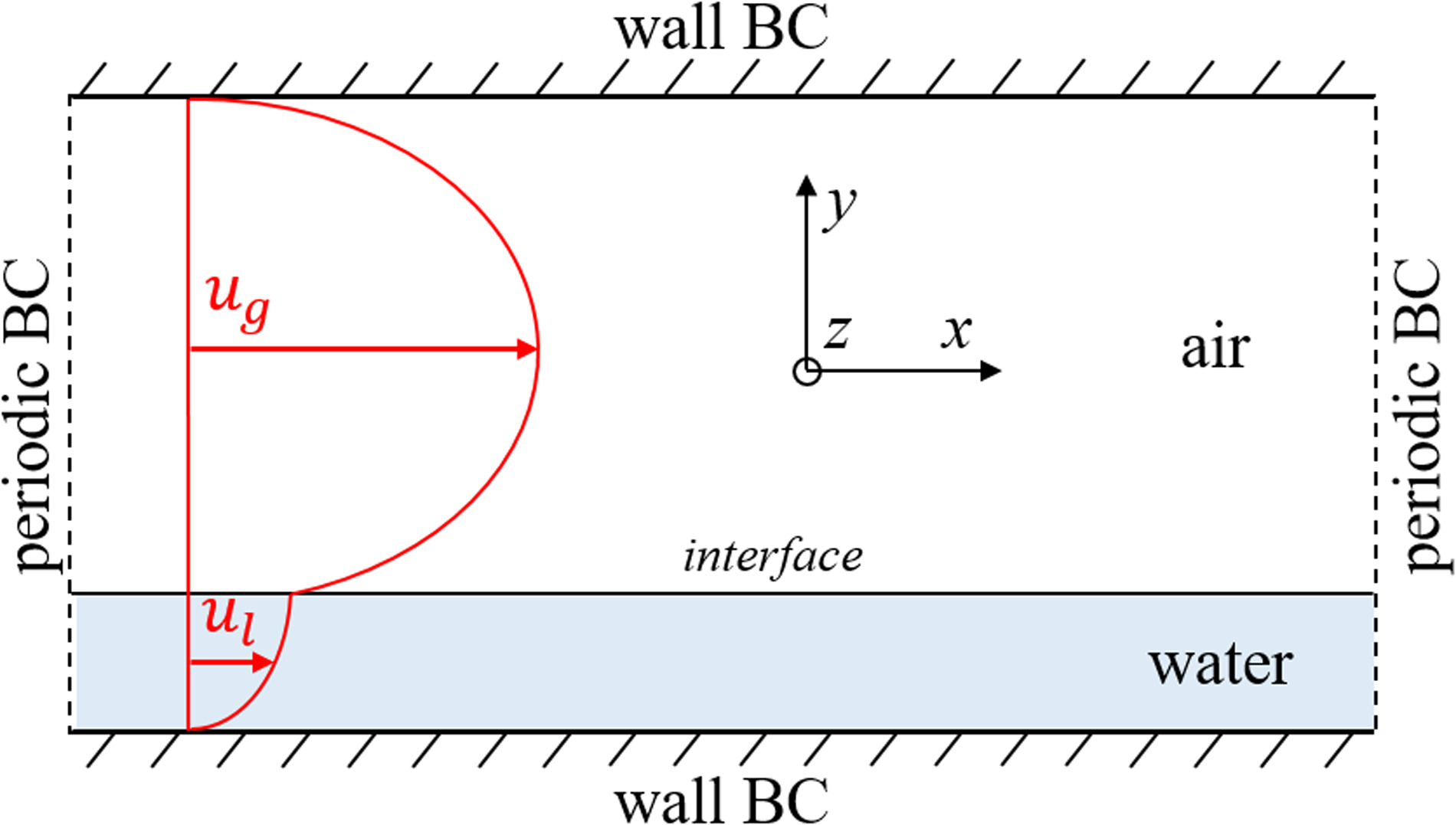
As previously mentioned, two flow configurations were tested. The first one is based on reference experiments (Fabre et al., 1987) and was designed to establish a proof of concept and validate the qDNS methodology. The second configuration is based on a shallow water air-shear driven flow configuration that is more representative of bearing chamber flows containing thin wavy films. These two configurations are referred to as “configuration 1” and “configuration 2” respectively. In both configurations, the liquid and the gaseous phase are co-current and the gaseous phase has a higher velocity than the liquid phase. The liquid phase is water and located at the base of the channel. The gaseous phase on top is air. No-slip boundary conditions are used for the top and bottom walls whilst periodic boundary conditions were used in the flow direction (x) and in the horizontal cross-flow direction (z). Figure 3 gives an overview of the domain and flow setup for both configurations. Both phases are driven toward the streamwise direction using velocity sources added to the velocity transport equations and applied to each phase.
Configuration 1
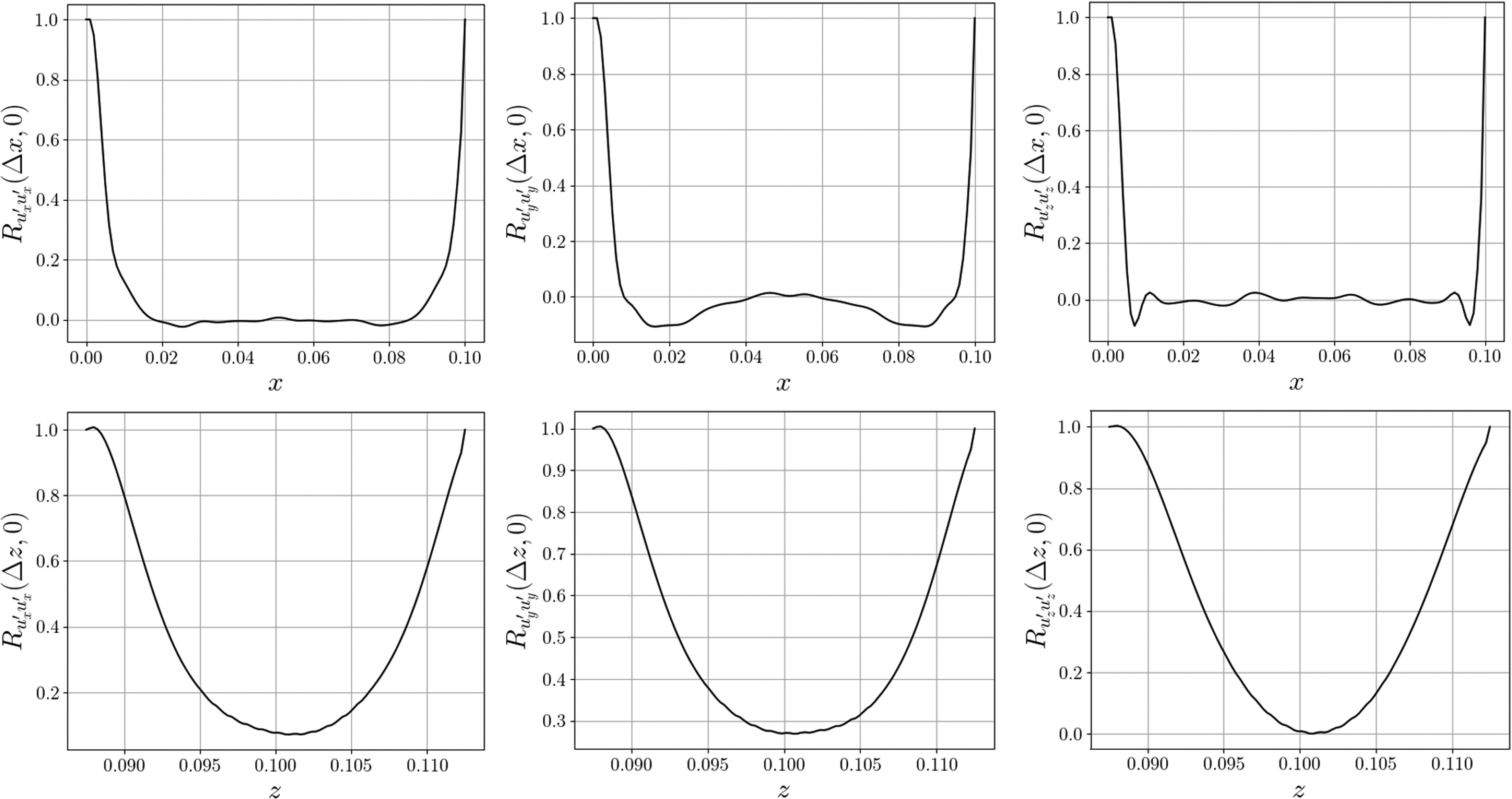
In the reference experiments, the channel is 12 m long, 0.1 m high and 0.2 m wide. The liquid bulk velocity is 0.45 m/s and the gaseous bulk velocity is 4.2 m/s. The computational domain was made periodic for computational cost and a periodic length of 0.2 m in the x direction and 0.025 m in the z direction was used. To examine the extent of the periodic dimensions an autocorrelation study of the flow was performed. The autocorrelation function was used to determine the minimum periodic length; if the periodic length is too small then large turbulent structures can overlap and lead to unphysical results. If the autocorrelation function of the fluctuation velocity drops to zero at a distance half of the periodic length, them this length is sufficient to prevent unphysical results (Fröhlich et al., 2005). The autocorrelation of a quantity is a function of the time lag
Figure 4.
Autocorrelation of the axial fluctuation velocity of the gas in the flow direction (left), cross-flow direction (right) and isosurfaces of instantaneous Q-criterion and contours of instantaneous vorticity magnitude from qDNS based on Fabre et al. (1987) experiments (centre) in configuration 1.
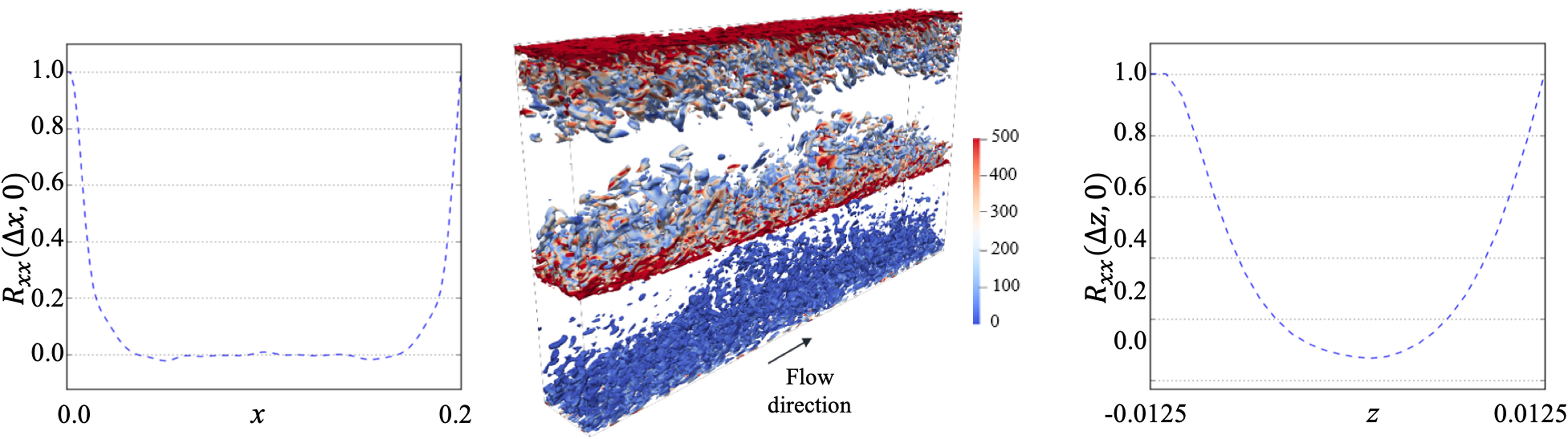
The autocorrelation in the cross-stream direction also reaches a value of zero halfway through the width of the channel and indicates a sufficient decorrelation of the flow in the cross-stream direction. The interface was set at 0.038 m from the base of the channel which gives a liquid layer thickness of 38% of the total height of the channel. A 3D representation of the flow with instantaneous Q-criterion isosurfaces and coloured with vorticity magnitude contours is shown in Figure 4. Additionally, the autocorrelations of all the fluctuation velocity components in both x and z directions are shown in Figure 7, Appendix A.
Configuration 2
In configuration 2, the domain is a periodic channel with similar boundary conditions to configuration 1. The periodic length of the channel in configuration 2 is 0.04 m in the x direction and 0.08 m in the z direction. The channel height is 0.026 m with no-slip boundary conditions at the top and bottom walls. The two-phase flow can be considered as a shallow-water flow.
A range of qDNS cases were carried out in order to produce a diversified dataset for the training of the machine learning model. In those cases, different interface height and bulk velocities for each phase were used. In addition to the training dataset cases, three additional test cases were performed using qDNS for different regimes and interface heights, cfg2-1, cfg2-2 and cfg2-3. The results from these three cases were used as reference for comparison with the corresponding RANS simulations using the RANS
Table 1.
Flow properties for the configuration 2 test cases.
Discretisation of the computation domain
In qDNS, the grid cell size
For the studied stratified flow, the characteristic length scale of each phase is its height h in the channel. The role of the smallest turbulent scales is to convert the TKE into internal energy. When slightly under resolved mesh is used, the role of those smallest scales can still be completed by the remaining resolved scales. For under resolved mesh
Implementation of the machine learning model
Neural Network type and architecture
There are different types of neural networks (NN) for ML methods. In this research, a feedforward neural network (FFNN) multilayer perceptron (MLP) is used. The FFNN consist of several layers containing the neurons: an input layer, some hidden layers and an output layer. The input layer takes the chosen input features and passes their information forward to the next hidden layers of the NN. In those layers, the sum of the output of the neurons of the previous layer and of a bias is calculated for each neuron that a layer possesses. The MLP implemented for the purpose of this research has 3 input neurons, 2 hidden layers of 256 neurons and 1 output neuron. The ReLU non-linear activation function was used.
Model training
For the training of the ML model, the mean squared error function was used for the loss and 512 epoch were carried out. The Adam optimiser algorithm was used for our gradient descent optimisation, with a learning rate of
ML-informed RANS k − ω
In configuration 1, the RANS simulation was informed by a ML model trained with the data of the corresponding qDNS simulation i.e., using the same geometry and flow regime. The aim was to establish a proof of concept and see if a coupling between a ML model trained to provide a correction for the
In configuration 2, the three test cases cfg.2-1, cfg.2-2 and cfg.2-3 were carried out using qDNS and were not included in the training dataset. The three corresponding RANS simulations were investigated with the aim of assessing the ability of a ML model trained with various flow conditions to predict an appropriate
As for the qDNS, the VOF solver interFoam was employed for all the RANS simulations, with the TVD scheme for the divergence terms in the transport equations of
Results and discussion
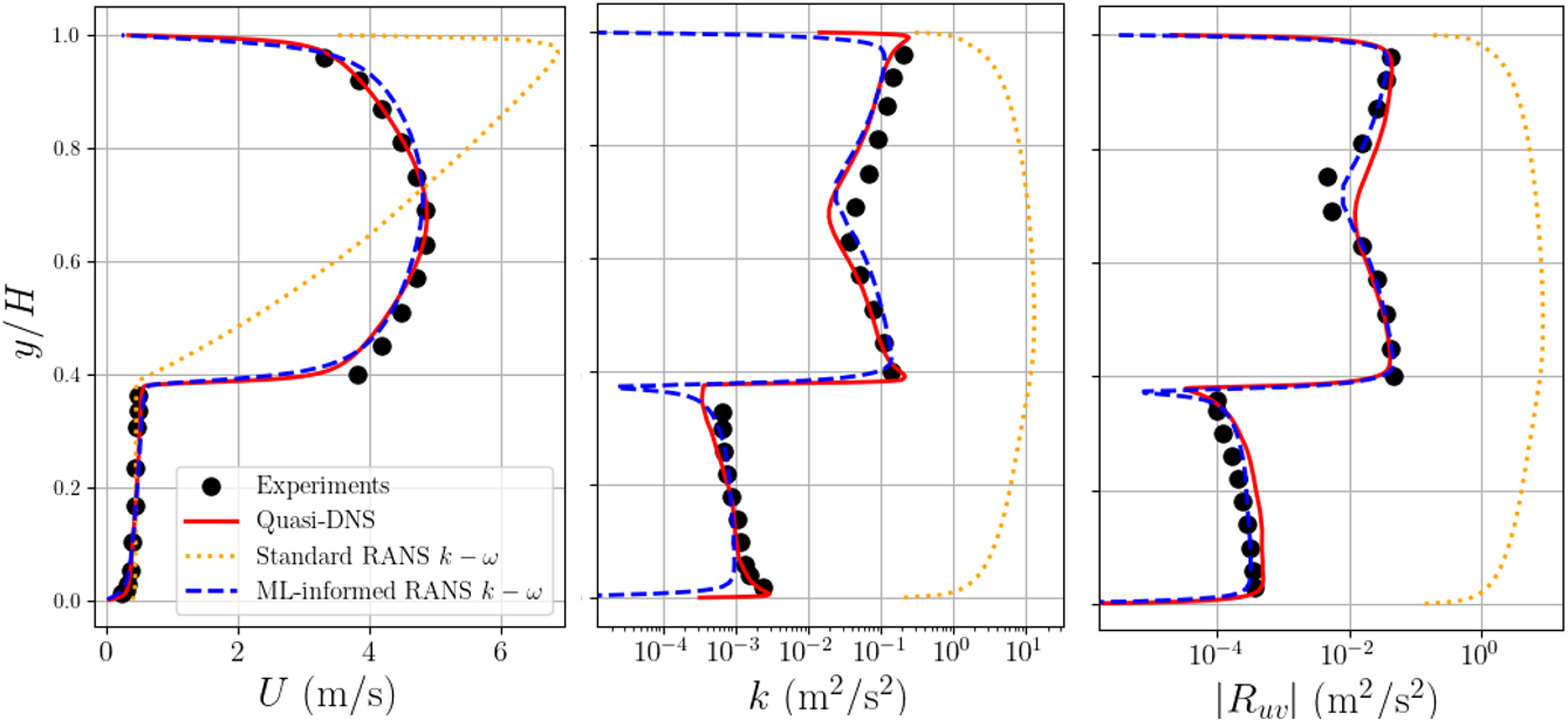
As previously mentioned, in configuration 1 the ML model was trained using a single qDNS dataset based on the Fabre et al. (1987) experiments as described in the methodology section. The RANS simulation was realised using the same flow conditions and coupled with this ML model as a proof of concept. The numerical results obtained from the qDNS and RANS using both the standard Wilcox’s and the ML-informed
Figure 5.
Comparison between qDNS, standard RANS k − ω k − ω
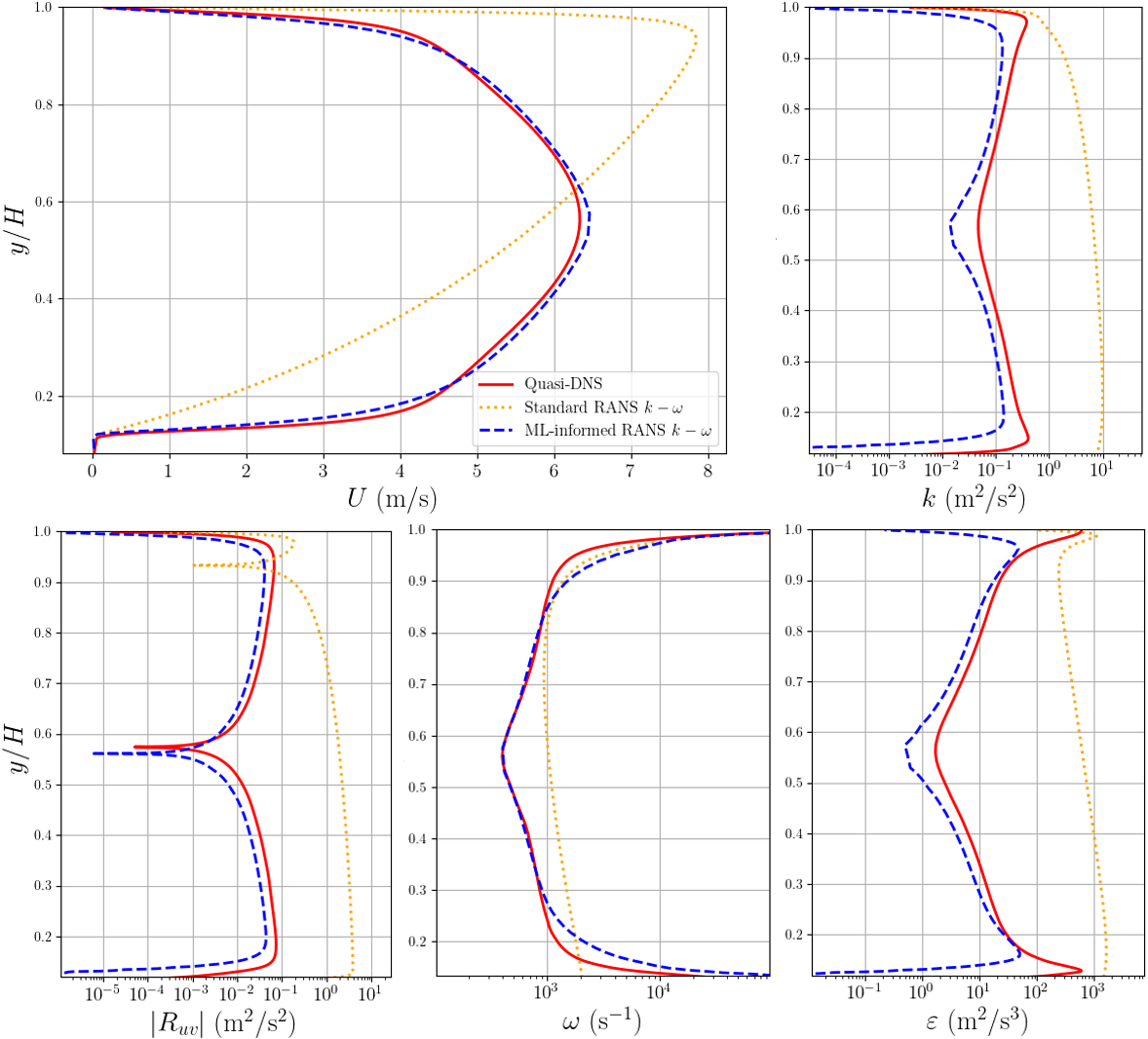
The next step consists in investigating how well a trained ML model perform with different (but relevant) data from the simulated case. Figure 6 shows a comparison between the qDNS, the standard and the new ML-informed RANS simulations of the three configuration 2 test cases. This time five quantities were compared: the mean axial velocity, TKE, Reynolds stress, specific turbulence dissipation rate
Figure 6.
Comparison between qDNS, standard and ML-informed RANS k − ω
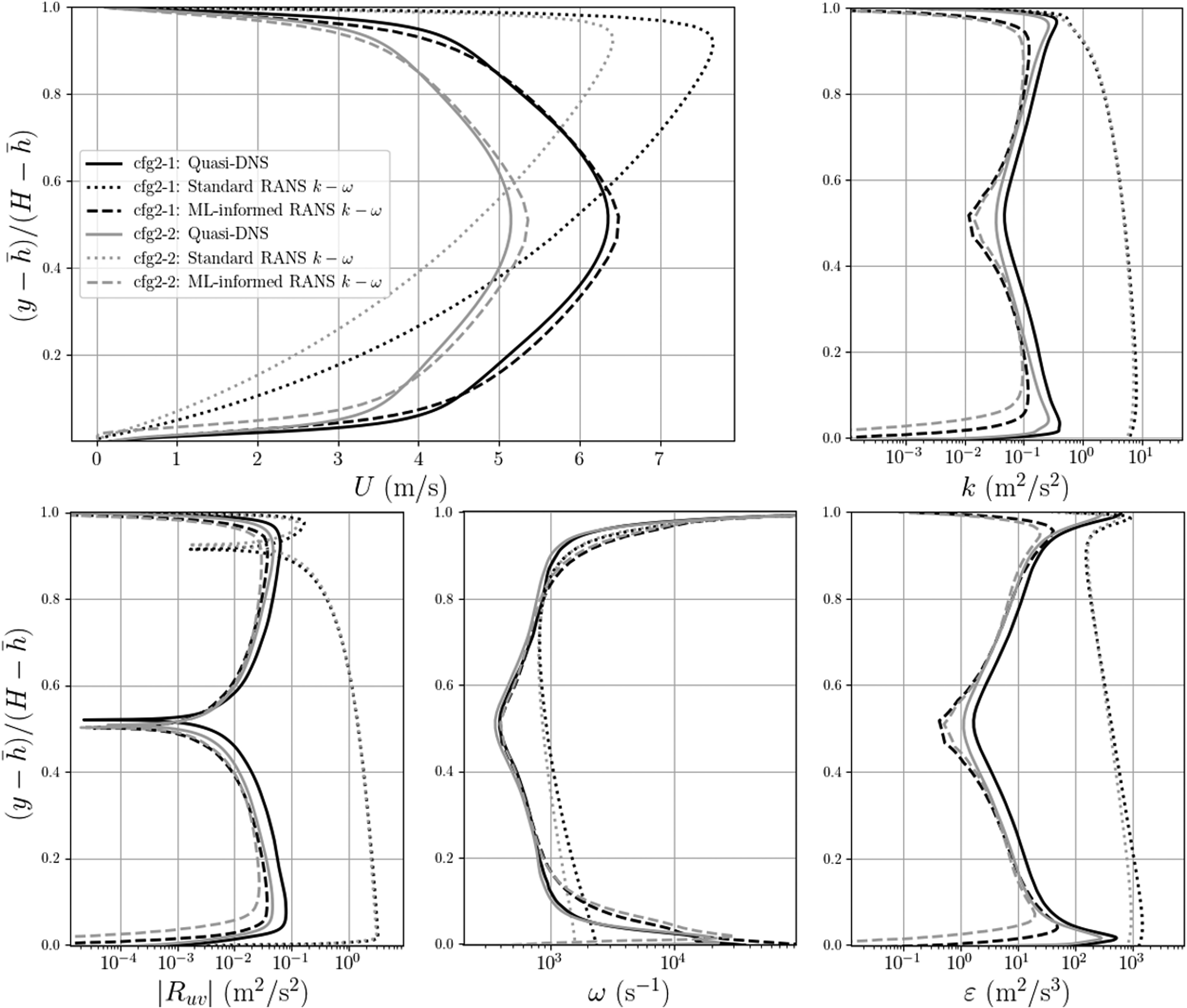
The ML-informed turbulence model slightly underestimates the TKE and turbulence dissipation rate in the centre of the channel and results are slightly closer to the qDNS for cfg.2-2. This would mean that the trained model might perform better for slightly lower speed regimes. Results of cfg.2-3 as shown in Figure 8, Appendix A also match the qDNS data very well for all quantities using the ML-informed
Overall, the ML-informed RANS simulations performed very well in contrast to standard RANS. Some improvements could be made by expanding and/or better balancing the training dataset for the ML model. Diversifying the cases may help the ML model to adapt to other different configuration too. Finally the ML model might benefit from additional input flow features such as spatial features (distance from the interface, distance from the wall).
Conclusions
In this paper, a novel approach for RANS modelling of two-phase co-current shearing flows was studied. This approach was developed as an alternative to the Egorov’s turbulence damping method (Egorov et al., 2004) that is mesh dependent and lack of guidelines for its use, which makes it case dependent as well. It was showed that a budget correction for the transport of
The promising results of the approach presented in this paper encourage further studies using machine learning as a tool to inform the interfacial turbulence in two-phase shearing flow simulations. Using a much larger dataset containing many cases with various flow conditions, the machine learning model would benefit from a higher quantity and more balanced training. The structure of the neural network could also be revised by changing the number of input features, hidden layers and neurons for example. Adding space related inputs to the model may increase the prediction accuracy. Further research could also investigate other open channel configurations.
Nomenclature
Abbreviations
CFD
Computational Fluid Dynamics
DNS
Direct Numerical Simulation
HPC
High Performance Computing
LES
Large Eddy Simulation
ML
Machine Learning
MLP
Multilayer Perceptron
NN
Neural Network
PISO
Pressure-Implicit with Operators Splitting
qDNS
Quasi DNS simulation
RANS
Reynolds Averaged Navier-Stokes equations
SIMPLE
Semi-Implicit Method for Pressure Linked Equations
TD
Turbulence Damping
TKE
Turbulent Kinetic Energy
URANS
Unsteady RANS
VOF
Volume of Fluid
Symbols
A
Vectorial field of the quantity A (−)
Time average of Ax x (−x x)
A′
Fluctuation of Ax x (−)
B
Turbulence damping parameter (−)
CD
Drag coefficient x x (−)
FD
Drag force x x (N)
FS
Surface tension x x (N)
H
Channel height x x (m)
h
Approximate interface height (m)
k
Turbulent kinetic energy (m2.s−2 x x)
Rxx
Autocorrelation function x x (−x x)
Ruu
Reynolds stress tensor (m2.s−2 x x)
Re
Reynolds number (−x x)
u
Velocity (m2.s−1)
ucomp
Compression velocity (m2.s−1)