
Introduction
Modern aero-engine low-pressure turbines, particularly high-speed turbines in decoupled architectures such as geared turbo fans, often feature a shrouded design to improve structural integrity. In terms of aerodynamics, shrouds eliminate the tip gap vortex. However, a cavity is formed between the rotating shroud and the stationary casing, giving rise to new and complex flow features inside the cavity.
Increasing the efficiency of shroud seals is thus an increasingly important task. Shroud cavities are usually designed as stepped labyrinth seals, where a rub-in coating or more complex, three-dimensional structures form the casing contour. The latter are particularly beneficial in terms of weight reduction and mitigating rub-in risk.
Steady-state evaluation of labyrinth seals can be characterized by two factors: The leakage mass flow or discharge and its accompanying dissipation of kinetic energy. The more leakage-flow momentum is dissipated, the lower the mass-flow rate but the higher the subsequent flow heating - which is critical for the structural integrity if the local component temperature is increased beyond tolerance. Understanding and predicting aerodynamic performance is thus of critical importance for the design of advanced seal configurations.
One of the earliest experimental works concerning the influence of honeycomb lands was conducted by Stocker et al. (1977) who designed a rotating rig for straight-through labyrinth seals. Stocker et al. found seal leakage to decrease for honeycomb lands compared to a smooth wall, unless the honeycomb cells were very wide compared to the clearance. Tipton et al. (1986) obtained similar results.
For stepped labyrinth seals, several authors observed an inverse trend with honeycomb lands increasing the leakage mass-flow rate (Schramm et al., 2002; Yan et al., 2010). Other authors, however, found leakage to decrease even in stepped labyrinth seals (McGreehan and Ko, 1989). Schramm et al. (2002) argue that the leakage decrease in straight-through seals compared to stepped seals results from the flow more directly interacting with the honeycomb, with the honeycomb acting as a rough surface dissipating the kinetic energy of the leakage flow. This dissipation counter-acts the observed increase in the effective clearance as flow enters the honeycomb. The performance of labyrinth seals with honeycomb lands thus greatly depends on the topology of the seal. Other geometric parameters to consider are those of the honeycomb geometry itself, particularly the ratio of fin width to honeycomb diameter and clearance (Zimmermann and Wolff, 1998; Schramm et al., 2002).
Experimental studies (such as Waschka et al., 1991; Denecke et al., 2004; Paolillo et al., 2007) using rotating rigs as well as numerical studies (Yan et al., 2009; Li et al., 2010; Nayak and Dutta, 2015) stress the importance of rotation on labyrinth seal performance. The discharge coefficient decreases for higher rotational speed while the flow heating or windage loss increases. Similarly, pre-swirl can have a drastic effect on windage heating by increasing or deceasing the wall shear stresses, depending on the swirl angle being positive or negative (McGreehan and Ko, 1989; Yan et al., 2010).
In the present work, the influence of honeycomb structures on aerodynamic performance is investigated in a rotating straight-through labyrinth seal test rig. Two configurations are studied: a smooth and a honeycomb-tapered casing. The comparison of both configuration aims at answering the following questions:
What is the influence of honeycomb structures on flow aerodynamics in turbine shroud straight-through labyrinth seals?
How does the labyrinth seal performance behave at different operating points?
How well can local and integral flow parameters be predicted by numerical RANS simulations and reduced-order correlations?
Methodology
To compare the leakage mass flow rate across different configurations at different operating conditions, we use the discharge coefficient
relating the minimum flow area

The flow coefficient
Flow and discharge coefficient are related via the contraction coefficient
In the literature several correlations to estimate the mass flow rate across a labyrinth seal can be found. For the present work we utilize the correlation by Egli (1935)
where
For the carry-over coefficient
Assuming an adiabatic system, windage heating can be related to flow losses using the estimation of entropy production
as derived by Moore and Moore (1983), where the first term on the right-hand side describes losses due to internal heat transfer and the second term denotes viscous dissipation. In both, turbulence is accounted for by including the eddy viscosity
across different configurations and operating conditions. The corrected speed is related to the reference speed of the aerodynamic design point (ADP) via
Test case
Experimental setup
The Institute of Turbomachinery and Fluid Dynamics operates a rotating labyrinth seal rig first described in Kluge et al. (2019). This rig permits investigating different turbine shroud cavity geometries experimentally at rotational speeds representative of low-pressure turbines. Kluge et al. (2020), e.g., previously investigated unsteady flow phenomena in the shroud cavity.
The test rig as depicted in Figure 2 employs a rotating disk mounted on a shaft driven by an electric motor. Air enters the rig through a volute inducing pre-swirl with a flow angle derived from the turbine rig described in Henke et al. (2016). The cavity is formed by the seal fin geometry carried by the rotating disk and the outer casing. For the present investigation, two different casing rings were manufactured. Both rings differ only in the area marked Variable geometry in Figure 3 with one ring featuring a smooth rub coating similar to that of a turbine and the other featuring a honeycomb structure.
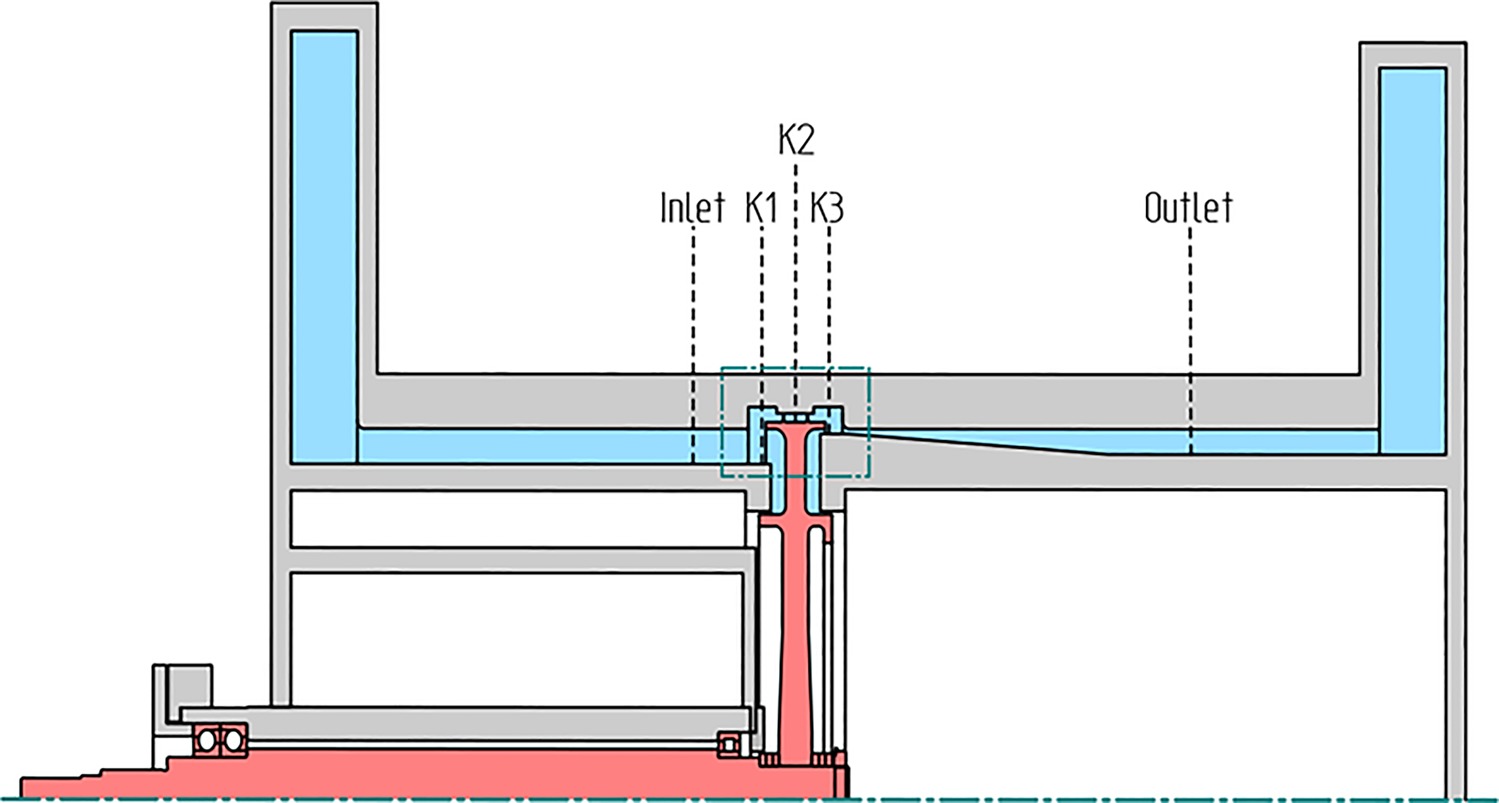
Figure 3.
Measurement positions inside cavity (left) and operating conditions of the test rig (right).
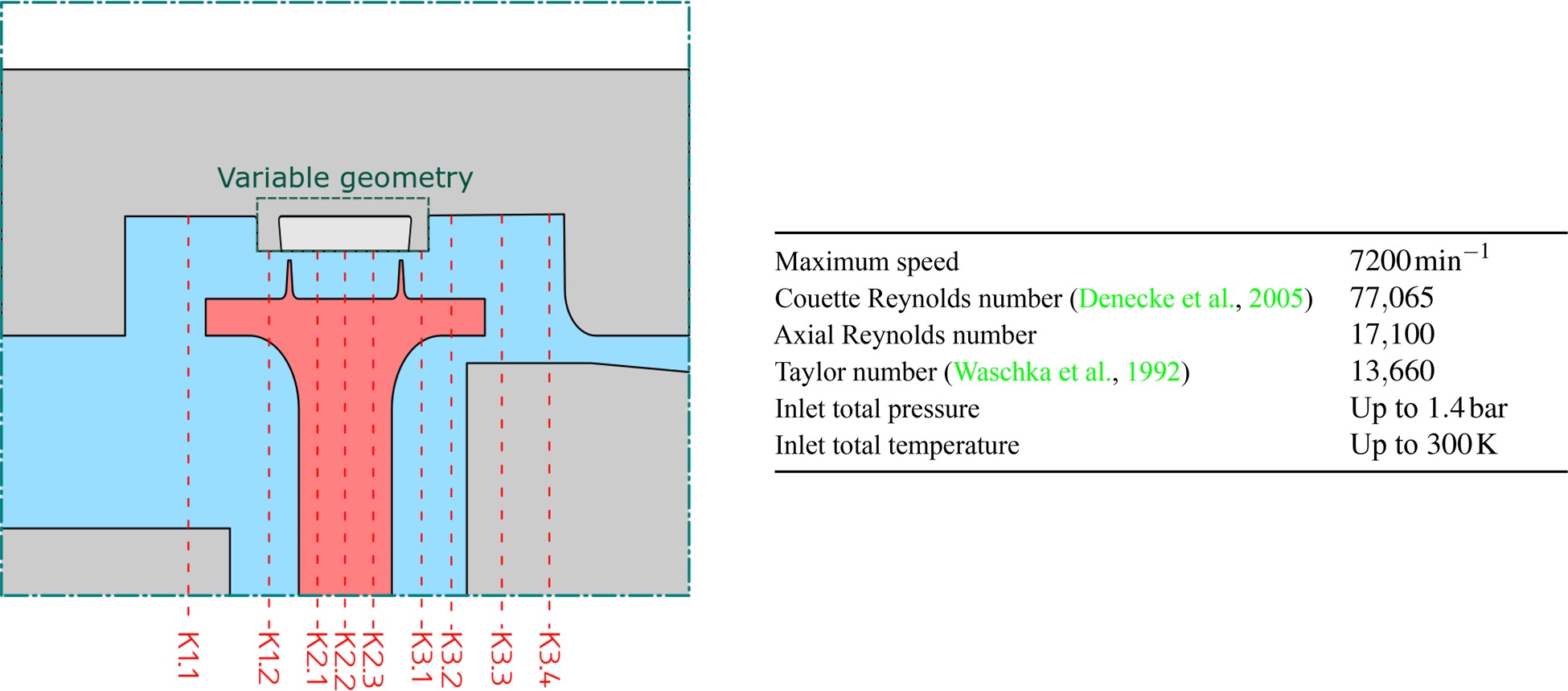
For this investigation of the honeycomb influence on seal flow characteristics, only the cavity geometry deviates from the general rig geometry first documented in Kluge et al. (2019). While the rotor is identical, the casing geometry has been modified. It comprises a constant-annulus section immediately above the rotating disk and two discontinuous changes in diameter upstream and downstream of this section (forward and backward facing steps). The configuration is shown in detail in Figure 3a. The cavity geometry can be subdivided into three sections: The cavity inlet region (K1), the swirl chamber (K2) and the cavity outlet region (K3).
At the rig inlet and outlet planes total pressure and temperature are measured using rake probes while wall taps at the hub and tip casing deliver the static pressure. The mid-span position of each rake is executed as a three-hole probe which yields the respective inlet and outlet flow angles. Additional wall taps line the casing wall at the cavity. Several axial positions—see Figure 3a—are used to obtain the axial pressure distribution, yielding not only the pressure upstream and downstream of the cavity, but also inside the swirl chamber. At K1.1, K2.2 and K3.3 six equidistant circumferential positions exist. For the configuration including the honeycomb structure, additional wall taps were introduced to obtain a more refined pressure distribution. These refinement positions comprise three equidistant circumferential positions. Both K1 and K3 also feature thermocouples near the casing, which are used to measure the change in static temperature across the swirl chamber. Uncertainties within a
In order to isolate the honeycomb influence, a constant pressure ratio and corrected rotational speed is maintained for both configurations. Flow and test parameters are listed in Figure 3b. Rotational speeds ranging from
Numerical model
Steady-state simulations have been conducted using the TRACE solver (Franke et al., 2005), which is developed by the German Aerospace Center and MTU Aero Engines AG. The computational grid is shown (distorted for better visibility) in Figure 4. A periodic segment size of
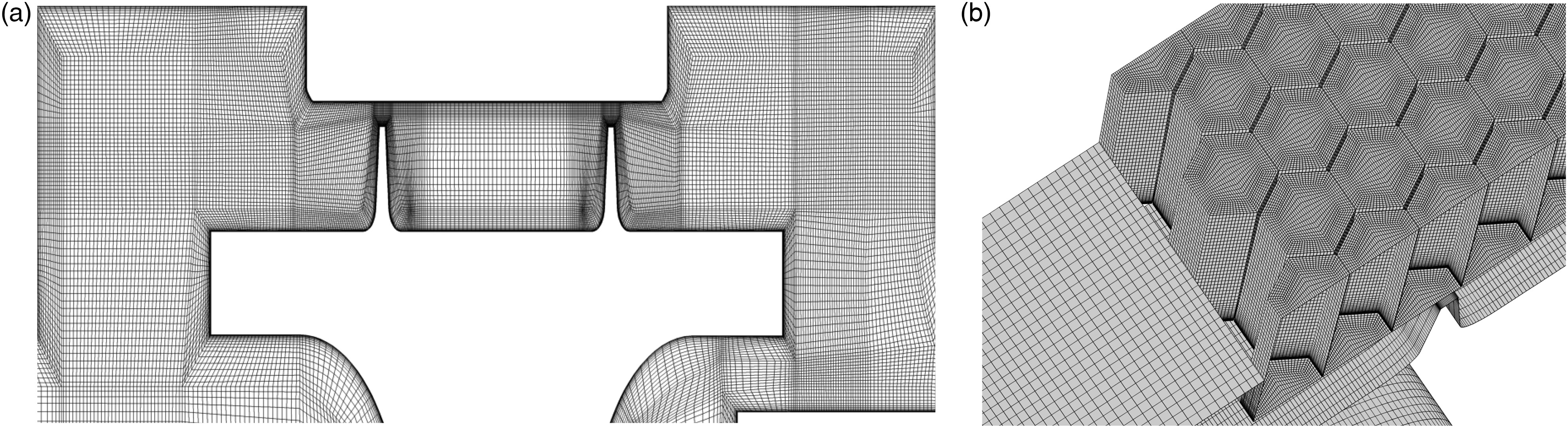
In circumferential direction, a periodic boundary condition is prescribed. The rotor is specified as a moving wall with the absolute speed of the experiment. At the inlet, radial profiles as obtained by experimental data (rake probes) are prescribed while the experimental back-pressure at the casing acts as the outlet boundary condition. The influence of centrifugal forces on the rotor diameter is accounted for by adjusting the radial gap size individually for every investigated speed on the basis of results obtained from structural simulations. For the honeycomb configuration, a fluid-fluid interface connects the main flow domain to the honeycomb domain. This interface allows for the direct transfer of information to the neighbouring domain via interpolation. In case an interface node in the main domain has no partner on the honeycomb side, a local no-slip wall treatment is prescribed instead.
A second-order accurate Fromm scheme (Darwish, 1993) with the van Albada limiter (van Albada et al., 1982) is employed for spatial discretization while a second-order central difference scheme is used to solve the viscous fluxes. The Wilcox 1988
The mesh described has been derived by means of a grid independence study in accordance with the guidelines of the ASME V&V Committee (2009). The influence of spatial discretization is assessed by way of the grid convergence index according to Roache (1994), calculated for the discharge coefficient:
The reference grid has been both coarsened and refined by a factor of
Table 1.
Grid Convergence Index of the discharge coefficient.
| 0.5994 | 0.5923 | 0.5874 | 0.01180 | 0.00823 | 0.55 | 0.0395 | 0.0264 | −0.0475 | −0.0322 |
All simulations featuring a smooth casing converged to an average residual of
Results and discussion
Effect of honeycomb structures on local flow field
We initially consider the influence of honeycomb structures on the local flow field at the nominal operating point (ADP). The axial pressure distribution through the test rig is depicted in Figure 5 using a pressure coefficient
Figure 5.
Comparison of axial pressure distribution for n rel = 100 % Π rel = 100 % 95 %

for both experiment and numerical simulation. As mentioned above, the measurement resolution has been refined for the honeycomb configuration while the smooth configuration features fewer measurement positions in axial direction. Comparing experiment and numerical simulation, we are able to demonstrate a high agreement in all measurement planes.
In the flow regions upstream of the first fin and downstream of the second fin the normalised pressure is nearly identical. As is apparent in Figure 5, the key difference is thus the pressure drop across both throttlings, i.e. how the total pressure drop is split across the geometry. For the configuration with a honeycomb structure at the casing, the drop across both sealings is almost equal, while the smooth configuration shows a larger drop over the first seal fin and a smaller drop across the second one. Within the swirl chamber, i.e. between both fins, a deviation in the trend can also be identified. While the honeycomb configuration shows the pressure rising and falling in several sections, the smooth case shows an initially falling pressure followed by a stronger increase immediately upstream of the second fin.
The circumferentially mass-averaged flow field of both the main flow domain and the honeycomb domain inside the swirl chamber is depicted in Figure 6. Upstream of the first fin, the flow field is accelerated due to the forward-facing step, as is evident in the initial pressure drop at
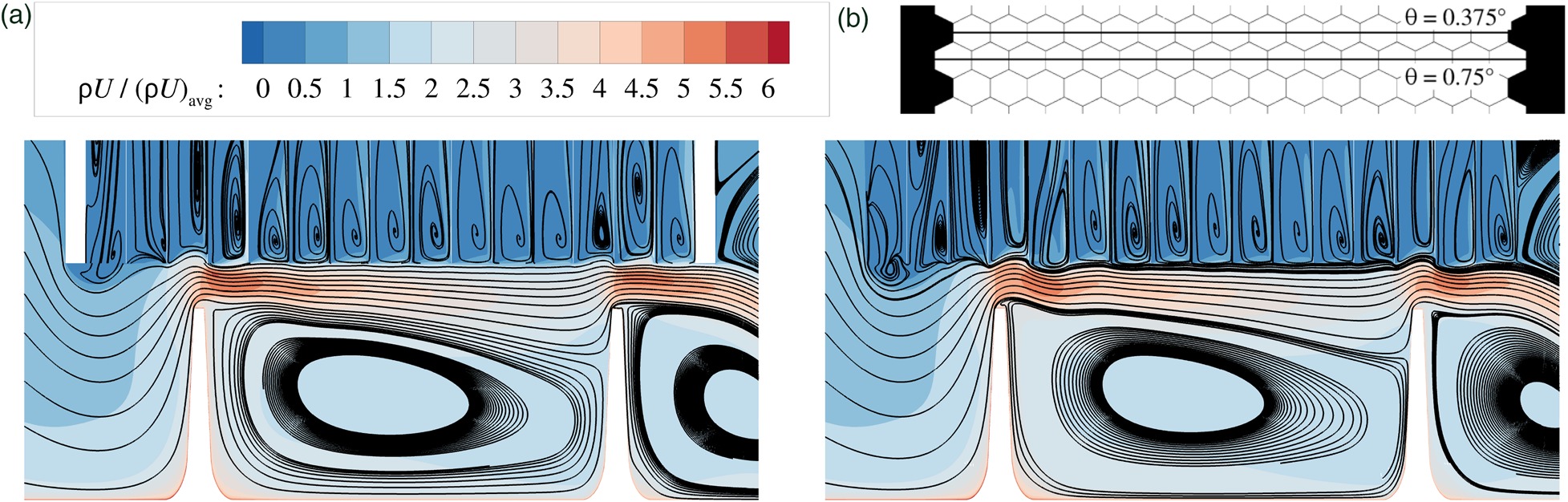
Figure 6.
Comparison of circumferentially averaged flow field in the swirl chamber for n rel = 100 % Π rel = 100 %

Based on the geometry of the honeycomb structure investigated, two extreme positions are identified at
Influence of rotation
Additional influences on the local flow field are considered by evaluating the effect of rotation. The nominal operating point (ADP) features the maximum rotational speed investigated. In Figure 8 the axial pressure distributions at differing rotational speeds and at a constant pressure ratio of
Figure 8.
Influence of rotational speed on pressure distribution and entropy production for Π rel = 90 %
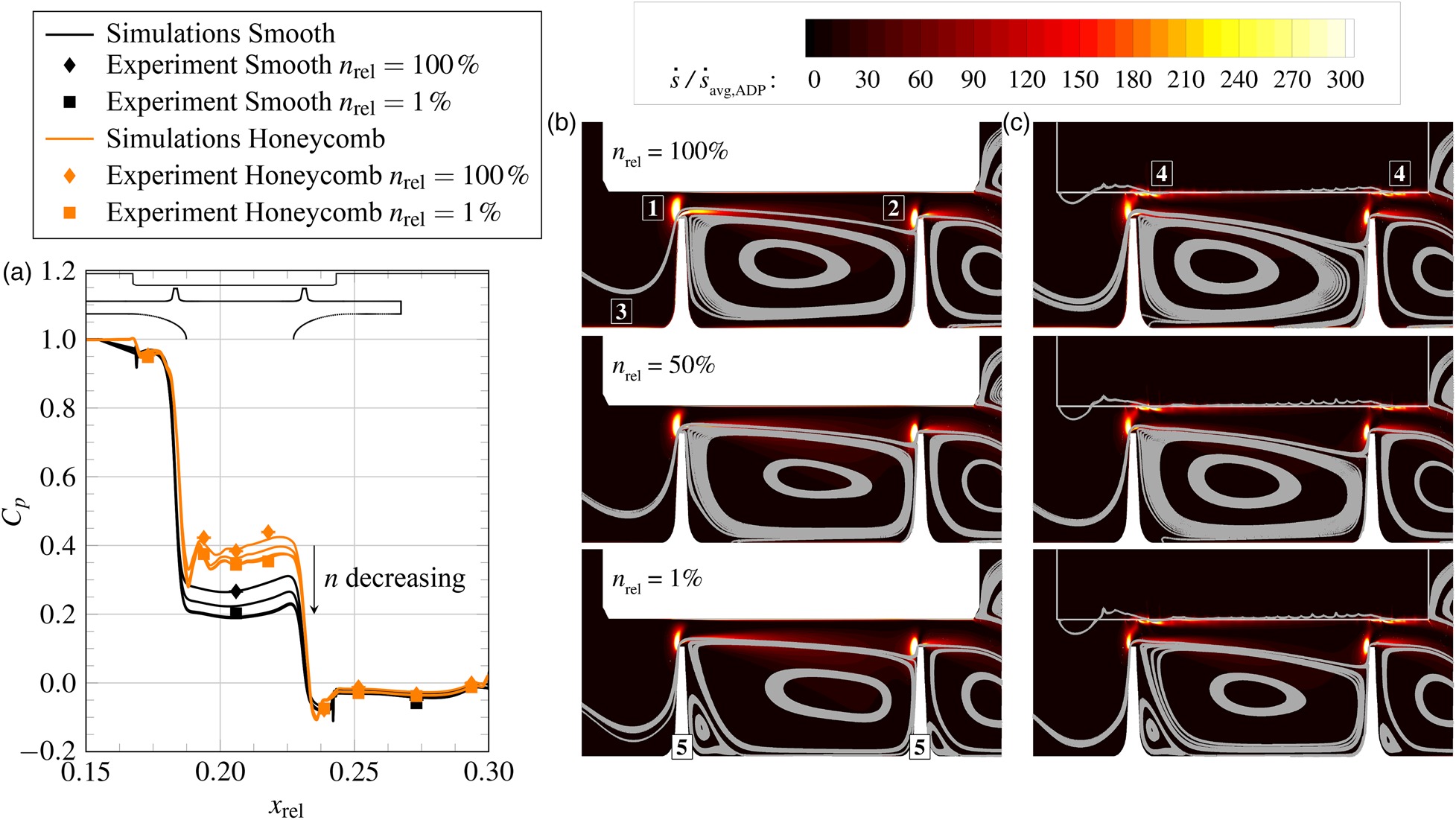
Both experiment and numerical simulation agree well with regard to the axial pressure distribution. The pressure drop again occurs almost equally across both throttlings for the honeycomb case while it is higher at the first fin for the smooth case. The swirl chamber pressure is thus higher for the honeycomb configuration. For both cases, the relative (to the second fin) pressure drop across the first fin increases with a decrease in rotational speed. Additionally, a change in trend inside the swirl chamber can be observed, with the distributions becoming flatter. This effect is more pronounced in the honeycomb configuration, which can be captured by the numerical simulation as well.
Considering the circumferentially averaged flow fields in Figures 8b and c, several characteristic effects can be observed:
The high velocity gradient immediately upstream of the first [1] and second [2] fins induced by the sudden acceleration across the throttling causes a significant rise in entropy production, i.e., loss. On top of the fins, local flow separation occurs. This separation likewise causes viscous dissipation inside the shear layer to the main flow. For the smooth configuration, these are the main source of loss, while this effect is weaker for the honeycomb configuration. Considering the streamlines, an increase in rotational speed results in more flow being entrained by the rotor and thus in an increase in the size of this separation bubble. While entropy production upstream of the first fin shows a dependency on rotational speed, it remains largely the same at the second fin regardless of speed.
At the rotating walls [3] friction induces losses. This contribution appears to be identical for both configurations as only a function of speed and reaches almost zero for
Friction at the honeycomb-tapered wall [4] is a considerable contribution to the total losses and marks the primary driver for increased losses in the honeycomb configuration. This effect is strongest immediately downstream of the fins and diminishes along a given streamline, correlating to the regions of strong main-flow-honeycomb interaction observed in Figure 7. No significant dependency on rotational speed appears to exist.
The widening of the jet between both fins shows a strong sensitivity to the rotational speed, particularly for the honeycomb configuration. With an area increase of the jet, the cross-section of the swirl-chamber vortex decreases in turn.
For zero and very low rotational speeds (e.g.
Integral parameters
The measured discharge coefficients for various rotational speeds and pressure ratios are depicted in Figure 9. Also included are the numerical results at
Figure 9.
Discharge coefficient for smooth (left) and honeycomb (right) configurations. Error bars indicate 95% confidence interval.
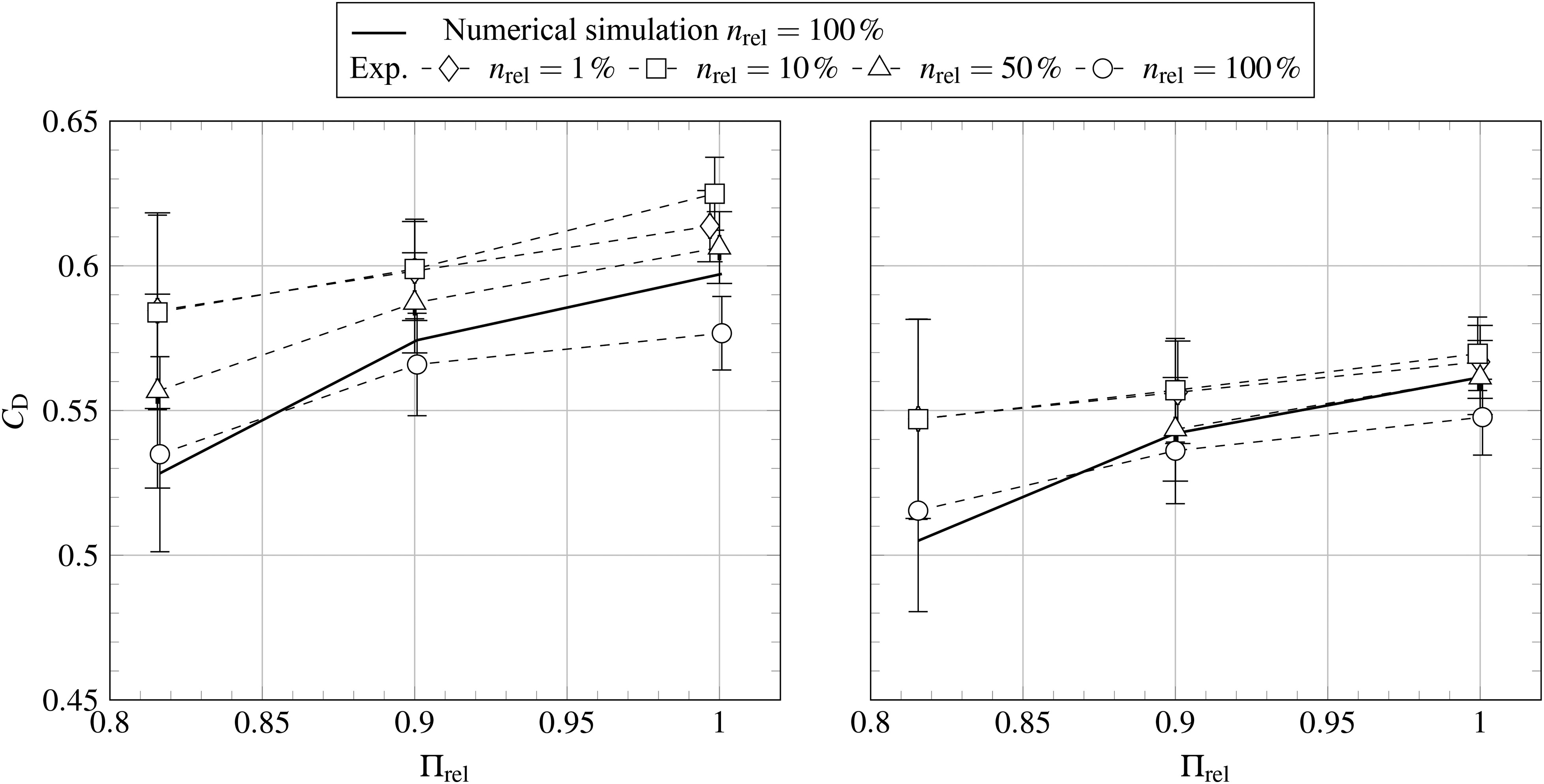
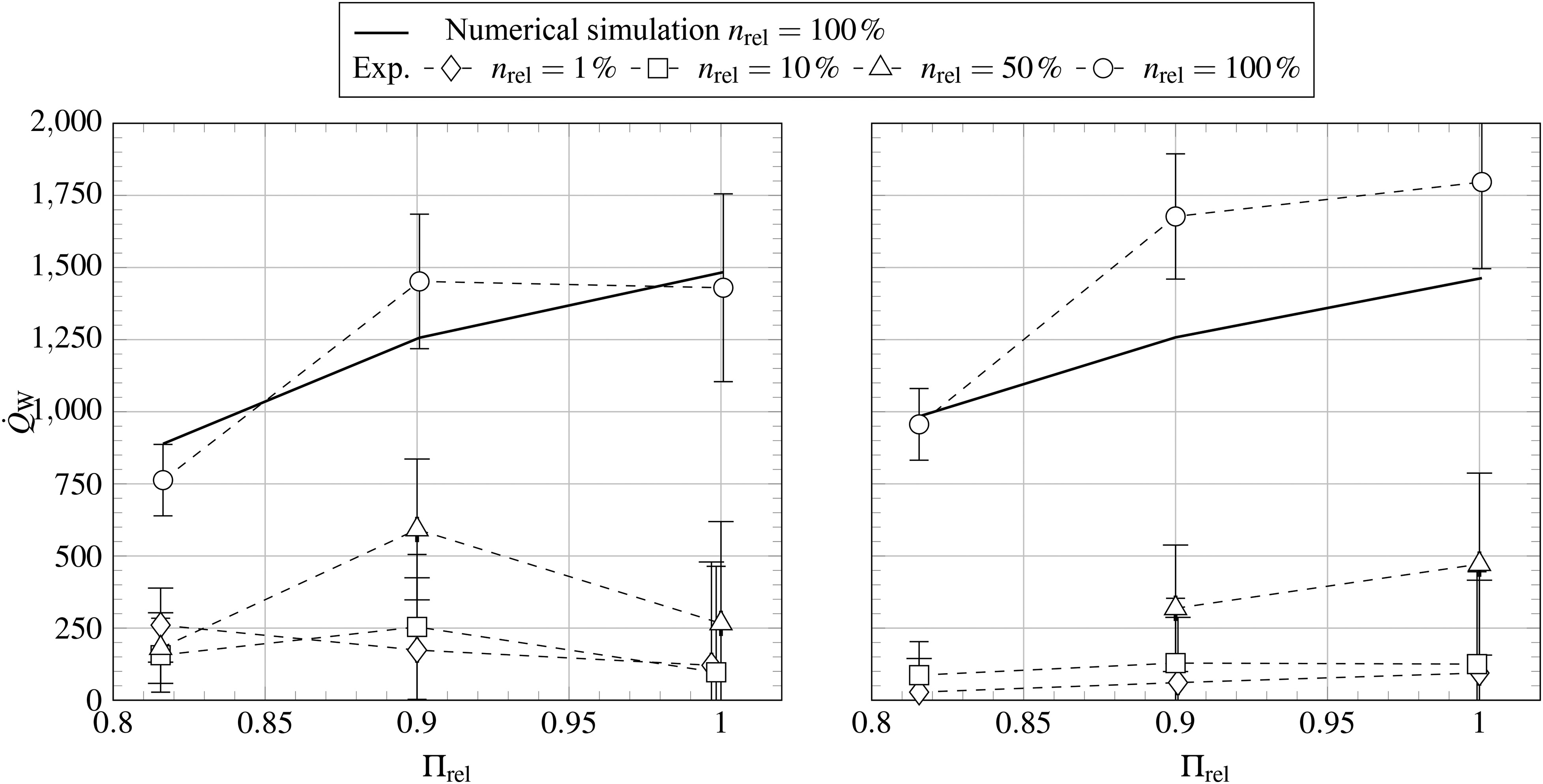
The discharge coefficient of the investigated honeycomb structure is lower than that of the smooth configuration for all speed lines investigated. While the total pressure drop remains the same, the mass flow rate through the labyrinth seal decreases, in line with the observed higher losses. Considering windage heating (Figure 10), higher dissipation of kinetic energy is apparent. At the nominal operating point, the temperature difference between the boundaries of the control domain increases by
Figure 10.
Windage heating for smooth (left) and honeycomb (right) configurations. Error bars indicate 95% confidence interval.
Even though the numerical simulations were demonstrated to capture the pressure drop across the labyrinth seal well, the prediction of integral parameters shows considerable deficits. Only for the lowest pressure ratios of the smooth and honeycomb configurations a good agreement can be found. At the higher pressure ratios, the discharge coefficient is over-predicted by
Finally, we consider the ability of empirical correlations to predict the mass flow rate of the labyrinth seal. Figure 11 depicts the mass flow rate relative to that at the nominal operating point for the smooth-casing configuration, i.e.,
Figure 11.
Mass flow rate for smooth (left) and honeycomb (right) configurations. Error bars indicate 95% confidence interval.
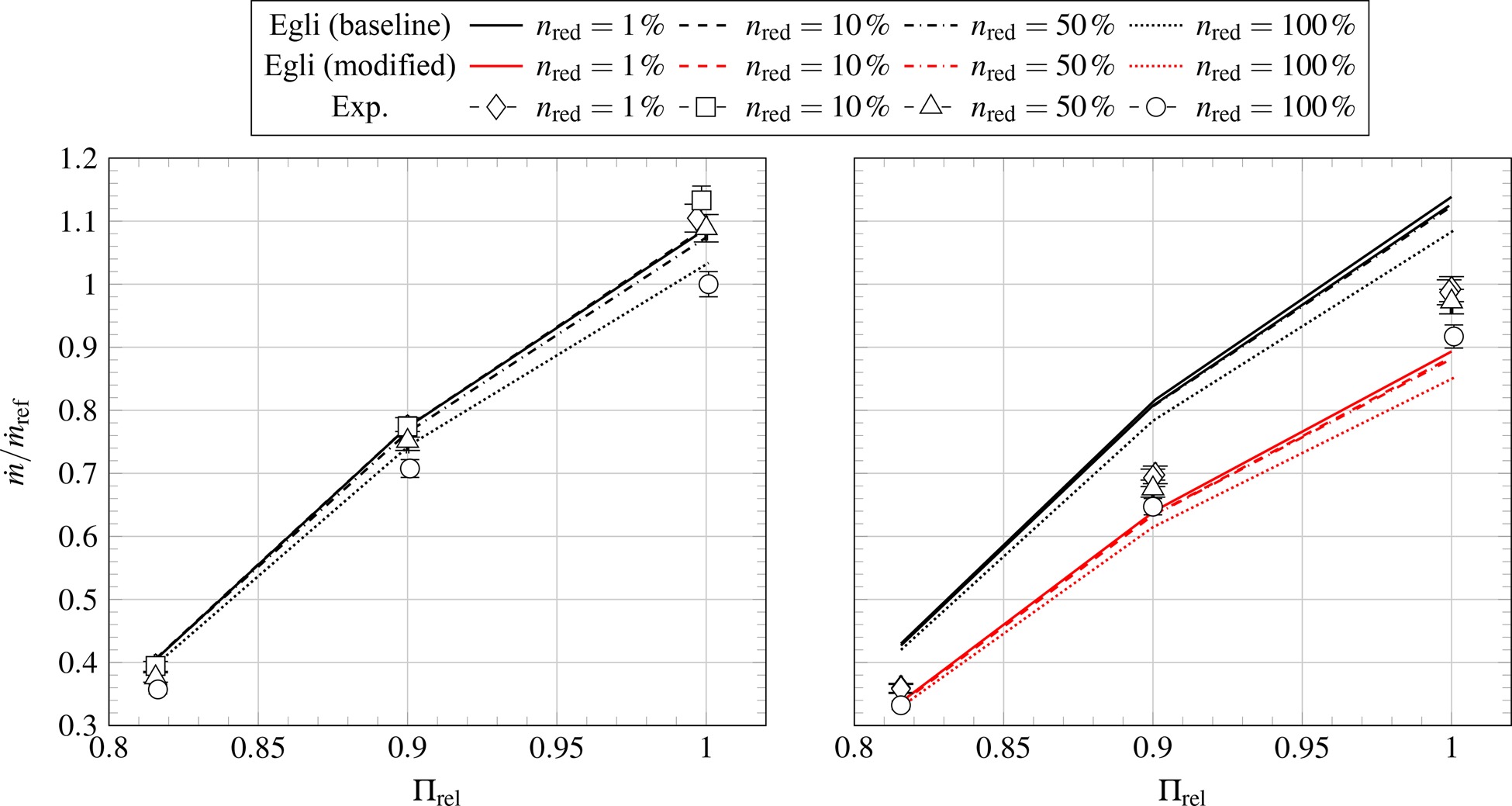
The results of this modification are included in Figure 11. For low rotational speeds, the modified correlation matches experimental results. For higher speeds, deviations increase as the correction factors were only obtained close to zero speed and prescribed for all operating points. This neglects the influence of rotation on dissipation and momentum (widening of the leakage jet) discussed previously. Obtaining correction factors in each operating point could enable a better prediction, but would require pre-existing results and thus defeat the purpose of such a correlation. It can nevertheless be demonstrated, that a correlation is possible when accounting for the effects discussed in this paper.
Conclusions
The aerodynamic performance of labyrinth seals in turbine shroud cavities was experimentally investigated using a rotating rig. Two configurations have been studied, one with a smooth casing and one featuring an engine-typical honeycomb structure.
As an experimental boundary condition, the same operating points, defined by pressure ratio and rotational speed, were investigated for both configurations. Although the effective area increases locally due to the axial positioning of the seal fins relative to the honeycomb, the discharge coefficient decreases for the honeycomb configuration. The main-flow honeycomb interaction region features low-momentum flow with considerable losses. This region is identified as the main difference when it comes to entropy production and resulting flow heating. The split in pressure drop across individual throttlings becomes more evenly distributed for the honeycomb configuration. An investigation into the sensitivity to rotation revealed that the leakage-jet cross-section increases as a function of speed. Higher speeds generally induce higher flow losses regardless of configuration.
Numerical simulations using RANS-based turbulence models are generally able to predict the local flow field in terms of pressure distribution, even capturing the influence of rotational speed on the pressure slope across the swirl chamber. The mass-flow rate is overpredicted by
We observe that correlations originally obtained for inner air seals at the hub reasonably estimate the experimental map despite shroud-typical geometries such as discontinuous steps in the casing contour. The maximum error in mass-flow estimation was found to be
This paper demonstrated the possibility of correcting for the honeycomb influence. Future research will focus on deriving a correlation that could be applied without detailed knowledge of the flow field. In addition to the steady-state measurements presented in this paper, unsteady measurements above the honeycomb and downstream of the swirl chamber were also conducted. These unsteady measurements may provide additional insight into the dissipation at the honeycomb and resulting loss generation when coupled with scale-resolving simulations.
Nomenclature
Latin symbols
area
contraction coefficient
discharge coefficient
isobaric heat capacity
pressure coefficient
relative error
factor of safety
heat conductivity
mass flow rate
rotational speed
number of sealings, number of nodes
pressure
heat flux
gas constant
refinement ratio
entropy
entropy production
temperature
velocity
Cartesian coordinate
axial coordinate